|
Regina Tokarczyk
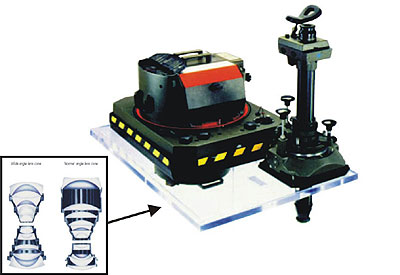
"Przychodzi baba do lekarza, a lekarz mówi: Zapraszam na pomiar fotogrametryczny". To wcale nie dowcip, czego dowodzą zamieszczone poniżej zdjęcia przedstawiające stanowisko robocze fotogrametrycznego systemu do trójwymiarowego pozycjonowania ciała, znajdujące się w przychodni rehabilitacyjnej (rys. 1) oraz okno programu tego systemu (rys. 2).

Rys. 1. Fotogrametryczny system trójwymiarowego pozycjonowania
ciała stworzony przy współudziale pracowników
Zakładu Fotogrametrii i Informatyki Teledetekcyjnej WGGiIŚ AGH w Krakowie
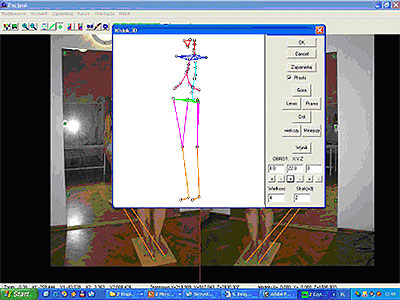
Rys. 2. Okno programu do trójwymiarowego pozycjonowania ciała. Lekarz, obserwując wzajemne ułożenie punktów i odcinków definiowanych przez wybrane miejsca na ciele pacjenta, wnioskuje o ewentualnych nieprawidłowościach postawy, co pomaga mu w kierowaniu przebiegiem rehabilitacji
Urządzeniem do rejestracji fotogrametrycznej są tu zwykłe amatorskie cyfrowe aparaty fotograficzne. Czy to oznacza, że do celów fotogrametrycznych niepotrzebny jest specjalistyczny sprzęt do rejestracji obrazu - kamery fotogrametryczne?
I tak, i nie, zależy to od celu pomiaru fotogrametrycznego, jego żądanej dokładności i ekonomiki. Uogólniając: w zastosowaniach topograficznych, inwentaryzacji architektonicznej oraz w tych przypadkach, gdzie żądana jest bardzo wysoka dokładność pomiaru - stosuje się do rejestracji kamery fotogrametryczne zwane metrycznymi. Przy pomiarach nietypowych obiektów lub zjawisk, gdzie dopuszcza się mniejszą dokładność lub nie jest możliwe stosowanie kamer fotogrametrycznych - stosuje się kamery niemetryczne, do których zaliczamy między innymi aparaty fotograficzne.
Co różni obydwa rodzaje kamer? Kiedy i w jaki sposób można wykorzystywać obrazy z kamer niemetrycznych? Zadaniem kamery fotogrametrycznej jest uzyskanie obrazu, który ma być rzutem środkowym, wobec tego powinien być on zarejestrowany na płaszczyźnie, a promienie rzutujące w przestrzeni przedmiotowej i obrazowej mają być kolinearne. Wiąże się to ze stosowaniem w kamerach analogowych klisz szklanych lub specjalnie wypłaszczanych materiałów fotograficznych o podłożu plastycznym, obiektywy kamer są prawie pozbawione dystorsji (rys. 3), nie używa się migawek zniekształcających obraz. Rekonstrukcja wiązki w kamerze dokonywana jest na podstawie znajomości jej elementów orientacji wewnętrznej, co wymusza ich stabilność i obecność na każdym zdjęciu zmaterializowanego układu odniesienia (rys. 4).
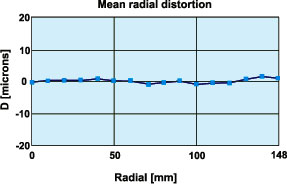
Rys. 3. Średnia dystorsja radialna obiektywu 15/4 UAG-S kamery lotniczej RC-30 Wild (Leica)
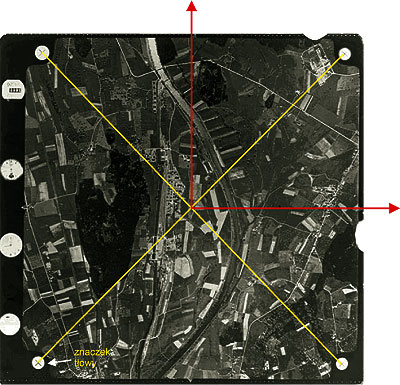
Rys. 4. Układ odniesienia na zdjęciu lotniczym materializowany jest przez znaczki tłowe
Kamery fotogrametryczne posiadają również urządzenia przeznaczone do orientowania rejestrowanego obrazu w przestrzeni: orientowniki, libele, stabilizatory położenia (dla kamer lotniczych). Ze względu na efektywność pomiaru stosuje się duże formaty obrazu, a z uwagi na wymagane dokładności - wysoką rozdzielczość materiałów negatywowych lub matryc detektorów.
O różnorodności kamer używanych do celów fotogrametrycznych świadczy choćby wielość kryteriów ich podziału. Mamy więc: kamery lotnicze i naziemne, ogniskowane na nieskończoność i bliskiego zasięgu, o stałym ogniskowaniu i o ogniskowaniu zmiennym, pojedyncze i stereometryczne, metryczne, semimetryczne i niemetryczne, a wreszcie - analogowe i cyfrowe.
Nowoczesną analogową kamerę lotniczą tworzą cztery główne części (rys. 5a, 5b):
- podwieszenie mocowane nad lukiem samolotu, stabilizowane za pomocą żyroskopów, w którym umieszczany jest stożek kamery,
- stożek kamery - wymienna część zbudowana z obiektywu (o różnych ogniskowych) połączonego na stałe z ramką tłową,
- ładownik na film zawierający również kompensator rozmazania obrazu FMC,
- urządzenie sterujące przeznaczone do zdalnego sterowania kamerą złożone z komputera i odpowiedniego oprogramowania podłączone do systemu GPS/INS.
Rys. 5a. Kamera RC30 Leica (Wild)
Rys.5b. Kamera RC30 Leica (Wild). Wymienne stożki różnią się obiektywami.
Elementy orientacji wewnętrznej kamer lotniczych wyznaczane są w procesie kalibracji dokonywanej zazwyczaj w specjalistycznych laboratoriach na przyrządach zwanych kalibratorami lub goniometrami. W metryce kamery, będącej podstawą do rekonstrukcji wiązki promieni rzutujących, wraz ze współrzędnymi znaczków tłowych w układzie tłowym umieszczane są informacje o dystorsji obiektywu (radialnej i tangencjalnej) i jego rozdzielczości.
Na każdym zdjęciu lotniczym znajduje się 4-8 znaczków tłowych oraz informacje umieszczane na ramce tłowej, takie jak: numer zdjęcia, ogniskowa obiektywu, wskazanie wysokościomierza i czasomierza (rys. 4), a w nowoczesnych kamerach mogą to być też współrzędne środka rzutów pozyskane za pomocą GPS.
Ramka tłowa jest połączona na stałe z obiektywem, tworząc stożek kamery. Zazwyczaj dany model kamery wyposażony jest w kilka standardowych stożków, różniących się ogniskową obiektywu. Wybór stożka do fotografowania jest uzależniony od rodzaju opracowania fotogrametrycznego (mapa wektorowa, rastrowa) i jego dokładności, od pokrycia i deniwelacji obrazowanego terenu. Tabela 1 przedstawia charakterystykę i przeznaczenie współczesnych stożków kamer lotniczych o formacie zdjęcia 23 x 23 cm.
Tabela 1. Charakterystyka standardowych stożków współczesnych kamer lotniczych
| Nazwa stożka |
Ogniskowa obiektywu [mm]* |
Kąt widzenia wzdłuż przekątnej [°]* |
Standardowa rekomendacja |
| Nadszerokokątny |
88 |
123 |
Wykonanie map wektorowych o dużej dokładności dla terenów płaskich i lekko falistych |
| Szerokokątny |
150 |
95 |
Wykonanie map wektorowych terenów płaskich i pagórkowatych |
| Półnormalnokątny |
210 |
76 |
Wykonanie fotomap terenów podgórskich i górskich |
| Normalnokątny |
300 |
57 |
Wykonanie fotomap, aktualizacji sytuacyjnej opracowań mapowych, dla terenów wysokogórskich |
| Wąskokątny |
600 |
30 |
Fotografowanie dużych miast z bardzo wysoką zabudową |
* Zarówno ogniskowa, jak i kąt rozwarcia kamery podane są w przybliżeniu
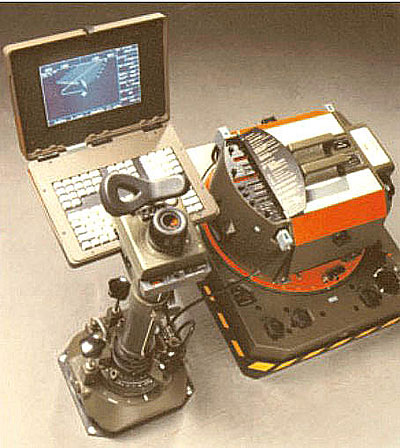
Kamery lotnicze z racji fotografowania z dużych odległości ogniskowane są na stałe na nieskończoność, natomiast kamery naziemne wykazują większe zróżnicowanie nastawienia odległości obrazowej. Jeszcze stare typy kamer (rys. 6), przeznaczone do opracowań topograficznych, ogniskowane były na stałą odległość, ich głębia ostrości była zazwyczaj duża i sięgała do nieskończoności. Po opanowaniu opracowań topograficznych przez fotogrametrię lotniczą opracowania naziemne dotyczą głównie zastosowań średniego i bliskiego zasięgu, zatem naziemne kamery fotogrametryczne mają najczęściej zmienną odległość obrazową (rys. 7). Ich metryki są bardziej rozbudowane niż dla kamer lotniczych, ponieważ zarówno elementy orientacji wewnętrznej, jak i dystorsja obiektywu przynależą do każdej odległości nastawienia na ostro.

Rys. 6. Kamera Photheo 19/1318 Zeiss Jena, kiedyś jedna z najpopularniejszych kamer naziemnych w Polsce. Ogniskowana na stałe, z przesuwanym w pionie obiektywem, orientownikiem i dwoma libelami do nastawiania orientacji zewnętrznej, pasująca do standardowej spodarki Zeissa

Rys. 7. Uniwersalna kamera pomiarowa UMK 10/1318 Zeiss Jena, jedna z najpopularniejszych kamer naziemnych w Polsce. Kamera o zmiennej odległości ogniskowania, z pochylaną osią w płaszczyźnie pionowej. Urządzenie do orientacji znajduje się w podwieszeniu kamery, libele - na jej korpusie
Do aplikacji inżynierskich, gdzie warunki powodują trudności w orientowaniu kamer na stanowisku pomiarowym, wyprodukowano kamery stereometryczne (rys. 8) składające się z dwu bliźniaczych kamer umieszczonych stabilnie w podwieszeniu, tak że ich wzajemne położenie, tzn. odległość między środkami rzutów (baza) i kąty orientacji, znane jest z dużą dokładnością.

Rys. 8. Kamera stereometryczna SMK 40 Zeiss Jena
(baza =40 cm) posiada wymienne zamocowanie
realizujące bazę fotografowania 120 cm
Rozwój techniki obliczeniowej umożliwił sięgnięcie po takie urządzenia do rejestracji obrazu, jak: aparat fotograficzny, kamera filmowa, kamera telewizyjna czy kamera wideo, co zaowocowało stosowaniem fotogrametrii w bardzo różnorodnych dziedzinach nauki i techniki. Użycie obrazów z kamer niemetrycznych wiąże się z odpowiednią metodą pomiaru. Generalnie można wyróżnić trzy grupy tych metod. Pierwsza zakłada adaptację kamery niemetrycznej do pomiarów fotogrametrycznych, a więc:
- w celu rejestracji obrazu na płaszczyźnie - fotografowanie na płytach szklanych,
- do wprowadzenia układu odniesienia na zdjęciach - domontowanie znaczków tłowych lub płytki Reseau,
- do ustalenia parametrów orientacji wewnętrznej - stabilizację położenia obiektywu względem płaszczyzny rejestracji (rys. 9).
Orientacja wewnętrzna i dystorsja obiektywu takiej kamery wyznaczana jest w procesie kalibracji na specjalnym polu testowym.

Rys. 9. Kamera semimetryczna Rolleiflex 6006
metric kalibrowana do kilku odległości
ogniskowania, z płytką Reseau
Druga grupa metod, zwana on the job calibration, polega na wyznaczeniu parametrów rzutowania drogą ich obliczenia na podstawie współrzędnych znacznej ilości punktów dostosowania, w które musi być zaopatrzony mierzony obiekt.
Trzecia grupa - metody samokalibracji - charakteryzuje się wysoką dokładnością pomiaru, tym większą, im więcej wykona się zdjęć i pomierzy na nich punktów homologicznych. Wymagana jest niewielka liczba punktów dostosowania (minimum 3) i niestety - skomplikowane specjalistyczne oprogramowanie.
Fotograficzny proces negatywowy był bardzo długo "wąskim gardłem" metod fotogrametrycznych i powodował, że nie mogły one dawać wyników pomiaru odpowiednio szybko, a tym bardziej w czasie rzeczywistym na stanowisku pomiarowym. Sytuację tę diametralnie odmieniło skonstruowanie kamery cyfrowej, w której obraz rejestrowany jest na matrycy światłoczułych detektorów. Obraz cyfrowy pozyskany w ten sposób może być przekazany do odbiorcy bardzo szybko, a nawet przetwarzany w czasie rzeczywistym. Pierwsze kamery posiadające niewielką rozdzielczość wykorzystywano do pomiarów nietopograficznych, ich najczęstszym zastosowaniem okazała się robotyka.
Problem niewystarczającej rozdzielczości światłoczułych matryc do wielkoformatowych kamer naziemnych usiłowano pokonać przez umieszczenie w płaszczyźnie tłowej kamery skanera, jednak zbyt długi czas rejestracji obrazu powstałego w tej płaszczyźnie spowodował, że kamery te można zastosować tylko do rejestracji obiektów statycznych, na przykład w inwentaryzacji architektonicznej.
Metody stereofotogrametrii lotniczej, których głównym produktem jest mapa w formie wektorowej lub rastrowej (co nie wymaga natychmiastowego otrzymania produktu finalnego), bazują obecnie głównie na zdjęciach analogowych, zamienianych na postać cyfrową za pomocą wysoko dokładnych skanerów fotogrametrycznych. Niemniej od kilku lat produkowane są cyfrowe kamery lotnicze, a ich popularność powoli rośnie. Wielkość i rozdzielczość dotychczas produkowanych matryc detektorów CCD lub CMOS nie pozwala na proste zastąpienie przez nie materiału negatywowego, tak jak to stało się w cyfrowych aparatach fotograficznych. Problem ten udało się częściowo rozwiązać dwiema metodami: przez skonstruowanie kamery opartej na koncepcji skanera elektrooptycznego z linijkami detektorów (rys. 10) oraz cyfrowej kamery modułowej (rys. 11).
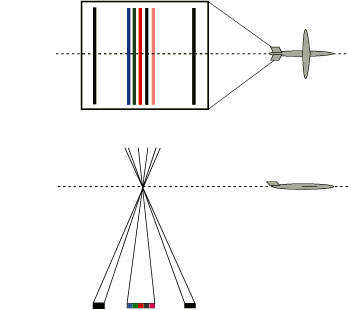
Rys. 10. Zasada obrazowania lotniczej kamery cyfrowej, opartej na koncepcji skanera elektrooptycznego. Obrazowanie w zakresie panchromatycznym realizowane jest przez trzy linijki rejestrujące nadirowo, wstecz oraz w przód i daje pokrycie stereoskopowe. Ponadto nadirowo rejestruje się obraz w zakresie RGB i w IR.
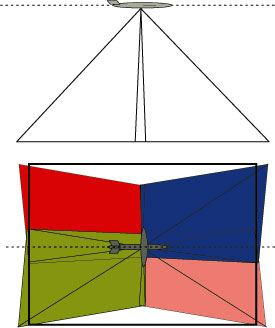
Rys. 11. Zasada obrazowania lotniczą cyfrową kamerą modułową. Kamera składa się z czterech kamer - modułów panchromatycznych, obrazujących teren z niewielkim pokryciem. Zasięg obrazów panchromatycznych pokrywa się z zasięgiem dodatkowych kamer obrazujących w zakresie RGB i IR. W procesie obróbki w oprogramowaniu kamery generowany jest jeden obraz - rzut środkowy z obrazów składowych
Dr hab. Regina Tokarczyk jest pracownikiem naukowym Zakładu Fotogrametrii i Informatyki Teledetekcyjnej Wydziału Geodezji Górniczej i Inżynierii Środowiska AGH w Krakowie
| 












 nadchodzące wydarzenia
nadchodzące wydarzenia
 zobacz pozostałe
zobacz pozostałe


