|
Jan Kryński
Postępujący w ostatnim 50-leciu rozwój technik obserwacyjnych i towarzyszący mu wzrost precyzji obserwacji obiektów niebieskich oraz rejestracji czasu sprawił, że niedokładności wynikające z definicji podlegającego obrotowi układu niebieskiego Katalogów Fundamentalnych FK oraz ziemskiego układu odniesienia zaczęły przewyższać malejące błędy obserwacyjne.
Niebieskie systemy odniesienia reprezentowane przez Katalogi Fundamentalne FK (Fricke i Kopff, 1963; Fricke, 1985; Fricke i in., 1988) zdefiniowane były poprzez pozycje i ruchy własne gwiazd oraz mechanikę newtonowską i wyrażone w kartezjańskim układzie współrzędnych (x1, x2, x3) w trójwymiarowej przestrzeni euklidesowej. Początek tych systemów umieszczony był w barycentrum (środku mas) Układu Słonecznego, a średni równik (od niego liczona jest deklinacja) i średni punkt równonocy (od niego liczona jest rektascensja) na epokę katalogu określały kierunki osi układu. Klasyczny schemat przejścia od katalogowego systemu niebieskiego poprzez systemy pośrednie do systemu ziemskiego przedstawiono na rysunku 1. Szczegółowy opis zasad transformacji można znaleźć w objaśnieniach do Rocznika Astronomicznego na rok 2005 (Kryński i Sękowski, 2004) lub w monografii wydanej przez Instytut Geodezji i Kartografii w Warszawie (Kryński, 2004c).
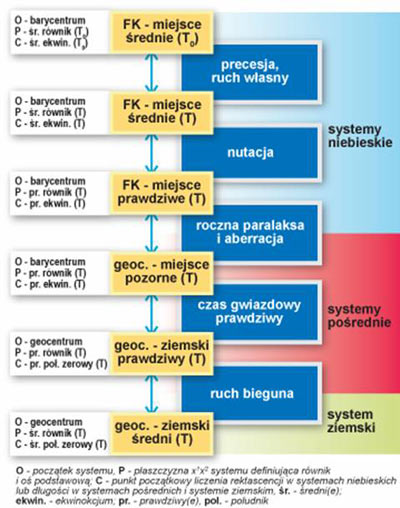
Rys.1. Ujęcie klasyczne relacji pomiędzy systemami odniesienia
Katalog FK5 zamiast FK4
Wraz z narastaniem liczby dokładnych obserwacji gwiazd i towarzyszącym temu procesowi doskonaleniem modelowania obserwacji parametry transformacji podlegały modyfikacjom. Począwszy od 1984 roku system Katalogu FK4 zastąpiony został systemem Katalogu FK5. Z uwagi na zastąpienie punktu równonocy wiosennej systemu FK4 punktem równonocy wiosennej systemu FK5 oraz z potrzeby zapewnienia ciągłości skali czasu uniwersalnego UT zmianie uległa definicja czasu gwiazdowego (Kryński i Sękowski, 2002).
Wprowadzenie CEP
Jednocześnie na mocy rezolucji kolejnych Zgromadzeń Generalnych IAU przyjęto za obowiązujące: model precesji IAU1976 i teorię nutacji IAU1980 (Kryński i Sękowski, 2004). W związku z tym w transformacji pomiędzy systemami niebieskimi i systemem ziemskim prawdziwy równik określony przez chwilową oś obrotu Ziemi został zastąpiony teoretycznym równikiem niebieskim określonym przez tzw. Efemerydalny Biegun Niebieski CEP (Celestial Ephemeris Pole). Za oś CEP przyjęto oś uśrednionej powierzchni modelu Ziemi o zerowej amplitudzie ruchu swobodnego, tzw. średnią oś Tisseranda Ziemi (Seidelmann, 1982). CEP pokrywa się ze środkiem quasi-kołowej dobowej trajektorii gwiazd na sferze niebieskiej. Można go uważać za prawdziwy biegun niebieski daty. Położenie CEP względem osi systemu katalogu fundamentalnego FK4 (a potem FK5) wyrażone jest przy użyciu modelu precesji IAU1976 i teorii nutacji IAU1980. Wymuszony ruch CEP względem ziemskiego systemu odniesienia odpowiada ruchowi średniej osi Tisseranda Ziemi (Capitaine, 2000). Z kolei położenie CEP względem osi ziemskiego systemu odniesienia (Kryński i Rogowski, 2004) wyrażone jest przy użyciu parametrów xp i yp ruchu bieguna wyznaczanych początkowo przez IPMS, a od 1988 roku – przez IERS. Wprowadzenie Niebieskiego Bieguna Efemerydalnego było pierwszym krokiem w kierunku wyodrębnienia pośrednich – pomiędzy niebieskimi i ziemskim – systemów odniesienia.
Ziemskie systemy odniesienia
W 1966 roku IAU w porozumieniu z IUGG zdefiniowała system odniesienia oparty na średniej osi obrotu Ziemi – określonej przez tzw. międzynarodowy umowny (konwencjonalny) średni biegun północny Ziemi CIO (Conventional International Origin), odpowiadający średniemu z lat 1900-05 położeniu ziemskiego chwilowego bieguna północnego – oraz na związanej ze średnią osią obrotu Ziemi i zdefiniowanej przez Międzynarodowe Biuro Czasu (BIH – Bureau International de l’Heure) płaszczyźnie południka początkowego, równoległego do średniego południka Greenwich. System ten został uznany za międzynarodowy ziemski system odniesienia, tzw. Umowny (Konwencjonalny) System Ziemski CTS (Conventional Terrestrial System). Rok później IAG (International Association of Geodesy) zatwierdziła Geodezyjny System Odniesienia GRS67 (Geodetic Reference System 1967), w którym zdefiniowane zostały podstawowe stałe geometryczne i fizyczne podlegającej ruchowi obrotowemu Ziemi oraz podana została nowa formuła opisująca normalne przyspieszenie siły ciężkości wraz z wartościami definiujących ją parametrów (IAG, 1971). Ekwipotencjalną elipsoidę odniesienia GRS67 zorientowano zgodnie z CTS. W 1980 roku na mocy uchwały Zgromadzenia Generalnego IUGG (IAG, 1980) system odniesienia GRS67 zastąpiony został nowym Geodezyjnym Systemem Odniesienia GRS80 (Geodetic Reference System 1980), który różni się od GRS67 wielkościami geometrycznych i fizycznych parametrów geocentrycznej elipsoidy ekwipotencjalnej (Moritz, 1984).
WGS72 i WGS84
Pierwszym globalnym systemem nawigacyjnym, stworzonym jako dzieło myśli, technologii i rąk ludzkich, był dopplerowski system TRANSIT (Time Ranging and Sequential – Navy Navigation Satellite System, NNSS). Ten amerykański system wojskowy uzyskał zdolność operacyjną w 1964 roku, a od 1967 roku został udostępniony do użytku cywilnego. Uzyskiwane na podstawie geodezyjnych pomiarów dopplerowskich dokładności pozycji na poziomie metra, a z czasem nawet kilku decymetrów, oraz konieczność dokładnego wyznaczania orbit satelitów TRANSIT doprowadziły do opracowania dokładniej zdefiniowanego ziemskiego systemu odniesienia. System taki pod nazwą WGS72 (World Geodetic System 1972) powstał w 1972 roku. Na początku lat 80. – z uwagi na dalszy postęp technologiczny i towarzyszący mu wzrost dokładności i czasowo-przestrzennej rozdzielczości obserwacji satelitarnych – pojawiła się nagląca potrzeba stworzenia nowego globalnego systemu obserwacyjnego w miejsce dotychczasowego WGS72. Do zdefiniowania systemu nazwanego WGS84 (World Geodetic System 1984) posłużono się parametrami GRS80 oraz satelitarnymi obserwacjami dopplerowskimi i laserowymi, a także obserwacjami VLBI. WGS84 używany był powszechnie do końca lat 80. jako system odniesienia dla GPS.
Profesor Jan Kryński był kierownikiem Zakładu Geodezji i Geodynamiki w Instytucie Geodezji i Kartografii w Warszawie
Opracowanie 2006
| 












 nadchodzące wydarzenia
nadchodzące wydarzenia
 zobacz pozostałe
zobacz pozostałe


