|
Jan Kryński
W geodezji pojęcia układów odniesienia i układów współrzędnych należą do fundamentalnych. Od układów odniesienia, do których mają być odniesione obserwacje geodezyjne, należy oczekiwać, iż będą one stabilne w czasie lub że mogą być matematycznie przekształcone do układów stabilnych na określoną epokę.
Pomiar powtórzony po pewnym czasie powinien prowadzić do tego samego wyniku, jeśli nie brać pod uwagę błędów obserwacji. Zmiany geometryczne (np. w położeniu punktów) o charakterze lokalnym lub regionalnym zazwyczaj wyznacza się w procesie opracowania obserwacji odniesionych do globalnego systemu odniesienia. Zmiany geometryczne o charakterze globalnym mogą być wyznaczone jedynie z obserwacji odniesionych do obiektów pozaziemskich, takich jak wybrane zbiory gwiazd czy odległe radioźródła, lub do stabilnego systemu satelitów. W praktyce geodezyjnej układy odniesienia i układy współrzędnych służą do matematycznego modelowania obserwacji geodezyjnych i ich opracowywania (wyrównywania). Spoziomowanie narzędzia pomiarowego oraz zorientowanie jego koła poziomego na stanowisku odpowiada realizacji obserwacyjnego układu odniesienia. W układzie tym wyrażane są obserwacje kątowe i liniowe wykonane na danym stanowisku. Na każdym stanowisku realizowany jest inny układ odniesienia.
Geodezja na płaszczyźnie
W przypadku wykonywania pomiarów szczegółowych, a w ogólności w pracach mierniczych, przyjmuje się, że kierunek linii pionu realizowany poprzez spoziomowanie instrumentu jest prostopadły do płaszczyzny „poziomu morza” oraz że układy odniesienia uzyskane za pomocą odpowiedniej orientacji koła poziomego na poszczególnych stanowiskach są jedynie wzajemnie przesunięte równolegle. Opracowanie obserwacji odbywa się wówczas w dwuwymiarowej przestrzeni euklidesowej z wykorzystaniem elementarnej geometrii.
Geodezja w przestrzeni trójwymiarowej
Definicja obserwacyjnych układów odniesienia wykorzystywanych w pracach geodezyjnych, w których uwzględnia się zakrzywioną figurę Ziemi, oparta jest na rzeczywistym kierunku linii pionu oraz kierunku północy, którego określenie wymaga znajomości położenia osi obrotu Ziemi. Zakrzywienie i wzajemna nierównoległość linii pionu powodują, iż w relacji pomiędzy obserwacyjnymi układami odniesienia wyrażonej w trójwymiarowej przestrzeni euklidesowej, obok składowej przesunięcia początków układów, występują składowe obrotu wokół trzech osi układu. Co więcej, do określenia parametrów tej relacji potrzebne są nie tylko wielkości geometryczne, ale także wielkości fizyczne wynikające ze struktury pola siły ciężkości Ziemi wpływające między innymi na kształt linii pionu. Pojawia się jednocześnie potrzeba wprowadzenia globalnego ziemskiego lub regionalnego układu odniesienia, w którym wyrażone byłyby obserwacje wykonane na różnych stanowiskach. Podstawowa oś takiego układu pokrywa się z osią obrotu Ziemi (w przypadku układu ziemskiego) lub pozostaje do niej równoległa (w przypadku układu regionalnego). Ostateczne opracowanie zredukowanych obserwacji przeprowadza się na powierzchni elipsoidy, wykorzystując jej geometrię.
Aby możliwe było przeliczenie pomierzonych wielkości z obserwacyjnego układu odniesienia do układu globalnego, kierunek linii pionu powinien być określony w tym globalnym, związanym z Ziemią, układzie odniesienia. Wyznaczenie kierunku linii pionu odbywa się za pośrednictwem pomiarów astronomicznych. Na podstawie pomierzonych w obserwacyjnym układzie odniesienia pozycji gwiazd (których położenie określone jest w nieobracającym się z Ziemią niebieskim układzie odniesienia zdefiniowanym na podstawie pozycji gwiazd oraz ich zmienności w czasie – reprezentowanym np. przez katalog fundamentalny) obliczane są szerokość i długość astronomiczna obserwatora, które w globalnym układzie odniesienia jednoznacznie określają kierunek linii pionu na stanowisku obserwacyjnym.
Parametry ruchu obrotowego Ziemi
W obliczeniach szerokości i długości astronomicznej obserwatora korzysta się z relacji pomiędzy globalnym ziemskim i niebieskim układem odniesienia, której parametrami są wielkości opisujące zmienność położenia osi obrotu Ziemi w przestrzeni oraz zmienność jej prędkości obrotowej (zwane parametrami ruchu obrotowego Ziemi).
Rzeczywista (chwilowa) oś obrotu Ziemi podlega okresowemu przemieszczaniu względem bryły Ziemi – znanemu pod nazwą ruchu bieguna – o podstawowych okresach rocznym i chandlerowskim (około 435 dni) oraz amplitudzie nieprzekraczającej 0˝,5. Jednocześnie chwilowa oś obrotu Ziemi podlega okresowemu przemieszczaniu względem ustalonego w przestrzeni układu odniesienia (a dokładniej względem układu inercjalnego, tzn. niepodlegającego obrotom i poruszającego się ruchem jednostajnym). Składowymi tego ruchu są precesja o okresie około 25 700 lat, która wywołuje zmienność położenia osi obrotu Ziemi o amplitudzie około 23°,5 oraz nutacja o podstawowym okresie około 18,6 lat i amplitudzie nieprzekraczającej 9",2 (patrz rys. 1)
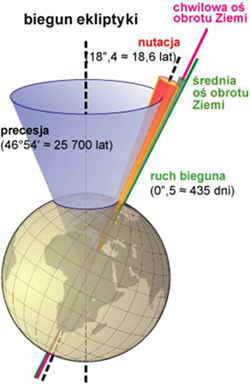
Rys. 1. Zmienność położenia osi obrotu Ziemi
Na opis położenia chwilowej osi obrotu Ziemi składa się element modelowany (do którego zalicza się model precesji i teoria nutacji) oraz element empiryczny (dotyczący ruchu bieguna, niemodelowalnych efektów nutacyjnych oraz nieregularności prędkości obrotowej Ziemi, czyli nieregularności astronomicznej skali czasu obrotowego). Wyznaczaniem parametrów elementów empirycznego opisu położenia chwilowej osi obrotu Ziemi, tzw. parametrów ruchu obrotowego Ziemi EOP (Earth Orientation Parameters), zajmuje się obecnie Międzynarodowa Służba Ruchu Obrotowego Ziemi i Systemów Odniesienia (IERS – International Earth Rotation and Reference Systems Service) Międzynarodowej Asocjacji Geodezji. Podstawę pomiaru czasu stanowi Międzynarodowy Czas Atomowy (TAI) w sposób ciągły monitorowany przez Międzynarodowe Biuro Wag i Miar BIPM (Bureau International des Poids et Mesures) w Paryżu.
Techniki satelitarne popularyzują układy odniesienia
Historycznie rzecz biorąc, problemy związane z definicją i realizacją układów odniesienia oraz określaniem ich wzajemnych relacji stanowiły wyłącznie przedmiot zainteresowania astronomów i geodetów. Geodeci zakładali osnowy geodezyjne, dostarczając praktyce mierniczej zbioru punktów o współrzędnych wyznaczonych w jednolitym globalnym układzie odniesienia, dostatecznie gęstego, aby móc wyrażać w nim wyniki pomiarów szczegółowych przy zastosowaniu prostego pomiarowo-obliczeniowego aparatu geometrycznego, z ewentualnym uwzględnianiem efektu krzywizny Ziemi. Zmiana nastąpiła wraz z rozpowszechnieniem stosowania w praktyce mierniczej globalnych systemów nawigacyjnych – NAVSTAR GPS (Navigation System with Time and Ranging – Global Positioning System), GLONASS (Global Navigation Satellite System) i w niedalekiej przyszłości Galileo – jako technik wyznaczania pozycji zastępujących w znacznym zakresie techniki tradycyjne. Wtedy bowiem problematyka układów odniesienia weszła w zakres zainteresowań wykonawców szczegółowych prac pomiarowych (w języku polskim również zwanych pracami geodezyjnymi). Pozycje bezpośrednio wyznaczane z obserwacji satelitarnych odniesione są do aktualnego, globalnego układu odniesienia, który jest układem kinematycznym. Sprowadzenie tych pozycji do państwowego systemu odniesień przestrzennych wymaga zastosowania odpowiedniej transformacji, której parametry wyznaczane są na podstawie opracowania ciągów obserwacji wykonywanych na krajowych stacjach permanentnych w ramach krajowych i międzynarodowych programów obserwacyjnych.
Nowe, dokładniejsze układy
Wraz z postępującym w ostatnim 50-leciu rozwojem technik pomiarowych i towarzyszącym mu wzrostem precyzji obserwacji obiektów niebieskich oraz rejestracji czasu, dotychczas stosowane układy odniesienia okazały się niedostatecznie dokładnie określone. Niedokładności wynikające z definicji podlegającego obrotowi układu niebieskiego Katalogów Fundamentalnych FK oraz ziemskiego układu odniesienia zaczęły przewyższać malejące błędy obserwacyjne. Odpowiednie grupy robocze Międzynarodowej Unii Geodezji i Geofizyki IUGG (International Union of Geodesy and Geophysics) oraz Międzynarodowej Unii Astronomicznej IAU (International Astronomical Union) opracowały nowe definicje układów odniesienia. Zgodnie z 2. Rezolucją XX Zgromadzenia Generalnego IUGG w Wiedniu w 1991 roku (IAG, 1992) jako obowiązujący wprowadzony został Umowny (Konwencjonalny) Ziemski System Odniesienia CTRS (Conventional Terrestrial Reference System). Monitorowanemu przez IERS systemowi CTRS nadano nazwę Międzynarodowego Ziemskiego Systemu Odniesienia ITRS (International Terrestrial Reference System). Uzupełniony formalizm definicji ITRS wraz z kompletną definicją Międzynarodowego Niebieskiego Systemu Odniesienia ICRS (International Celestial Reference System) oraz uaktualnionymi i spójnymi systemami czasu, a także określeniem relacji pomiędzy tymi systemami, zatwierdziło XXIV Zgromadzenie Generalne IAU w 2000 r. w Manchesterze w formie rezolucji B1.1-B1.9 (IAU, 2001; Kryński, 2004c). Definicje te przyjęto jako obowiązujące od 1 stycznia 2003 r.
Systemy a układy
Praktyczne problemy związane z utrzymaniem układu odniesienia, tak aby niezależnie od epoki można było w nim równie dokładnie określić położenie punktu (w szczególności, aby zachować zgodność opracowania jednakowo dokładnych pomiarów pozycji tego samego punktu, wykonane w różnych epokach), stwarzają potrzebę rozróżnienia związanych z nim pojęć. Wraz z nowymi definicjami określono zatem (np. IERS, 2003), czym są: systemy odniesienia (reference systems), układy odniesienia (reference frames) i układy współrzędnych (coordinate systems). Rozróżnienie to, nie do końca precyzyjne, szczególnie w odniesieniu do istniejących wcześniej systemów i układów, stanowi przedmiot dyskusji wśród specjalistów skupionych wokół IAU. Nie jest również w pełni akceptowane przez przedstawicieli krajowego środowiska naukowego, na co dodatkowy wpływ mają względy terminologiczne w języku polskim (Kołaczek, 2004). Pierwsze próby sformułowania systemów i układów w krajowej literaturze zostały podjęte przy okazji opracowania Rocznika Astronomicznego IGiK (Kryński i Sękowski, 2003, 2004), a następnie dyskutowane były podczas obrad zorganizowanych pod patronatem Komitetu Geodezji PAN w maju 2004 r. warsztatów pt. „Nowe obowiązujące niebieskie i ziemskie systemy i układy odniesienia” (Kryński i Rogowski, 2004). Proponuje się użycie następującej terminologii:
- System odniesienia (reference system) stanowi zbiór zaleceń i ustaleń oraz stałych wraz z opisem modeli niezbędnych do zdefiniowania początku, metryki (skali) i orientacji osi układu współrzędnych oraz ich zmienności w czasie.
- Układ odniesienia (reference frame) stanowi praktyczną realizację systemu odniesienia. Jest on zdefiniowany poprzez zbiór fizycznych punktów o dokładnie wyznaczonych współrzędnych w układzie określonym w definicji systemu odniesienia. Definicja ta określa jednocześnie wyznaczone z obserwacji wartości parametrów opisujących początek układu, metrykę (skalę) i orientacje osi układu współrzędnych oraz ich zmienności w czasie.
- Układ współrzędnych (coordinate system) określa jednoznacznie sposób przyporządkowania zgodnie z przyjętą metryką zbioru wartości liczbowych – współrzędnych punktu – położeniu punktu w przestrzeni względem osi tego układu.
Pojęcia systemu odniesienia, układu odniesienia i układu współrzędnych bywają często utożsamiane. Przytoczone powyżej definicje bywają niekiedy parami bądź wszystkie naraz łączone, najczęściej pod nazwą układu współrzędnych. Rozdział tych pojęć ma zasadnicze znaczenie w fizyce stosowanej, do której zalicza się problematyka niebieskich i ziemskich systemów odniesienia realizowanych na podstawie obserwacji i modeli zjawisk fizycznych. Nieścisłości terminologiczne związane z tymi pojęciami pojawiają się szczególnie często w opracowaniach w języku polskim. Należy zaznaczyć, że problem nie istnieje w przypadku rozważań czysto teoretycznych, w których sformułowane są ścisłe relacje przyporządkowujące współrzędne punktu jego położeniu względem układu. Układem takim jest układ współrzędnych z przypisaną mu metryką reprezentującą jego geometrię.
Układy statyczne i kinematyczne
Realizacja ziemskich i niebieskich układów odniesienia odbywa się na podstawie obserwacji obiektów pozaziemskich z wykorzystaniem modeli ich ruchu względem obserwatora. Punktami, których położenie definiuje niebieskie układy odniesienia, są wybrane, wystarczająco długo i precyzyjnie obserwowane gwiazdy (w paśmie widzialnym lub radioźródła). Ziemskie układy odniesienia definiowane są poprzez położenie punktów na powierzchni Ziemi, na których wystarczająco długo i precyzyjnie obserwowane są obiekty pozaziemskie w ramach jednolitych międzynarodowych programów obserwacyjnych. W zależności od dokładności obserwacji, długości wykorzystywanych serii obserwacyjnych oraz dokładności modelowania można rozróżnić statyczne i kinematyczne układy odniesienia.
Układ odniesienia będący realizacją konkretnego statycznego systemu zdefiniowany jest poprzez współrzędne wybranych punktów. Wybór punktów realizujących system wraz ze współrzędnymi tych punktów określonymi zgodnie z przyjętą metryką systemu definiuje statyczny układ odniesienia. Jednoznaczność określenia kierunków osi układu odniesienia, w przypadku większej niż niezbędna liczby definiujących go punktów, otrzymuje się poprzez dodatkowe użycie warunku najmniejszych kwadratów. Do statycznych ziemskich układów odniesienia zaliczają się układy, w których nie uwzględniano zmian w czasie wzajemnego położenia stacji obserwacyjnych wywołanych ruchami tektonicznymi. W szczególności statycznymi ziemskimi układami odniesienia były układy, których definicje oparte były na określeniu kierunków osi tych układów.
Kinematyczny układ odniesienia zdefiniowany jest poprzez współrzędne punktów realizujących system odniesienia oraz zmiany w czasie współrzędnych tych punktów (prędkości) zgodnie z przyjętą metryką systemu. Tylko punkty o odpowiednio dokładnie wyznaczonych wektorach prędkości – co jest związane z ciągłym monitorowaniem ich pozycji w odpowiednio długim przedziale czasu – mogą być zaliczone do punktów realizujących kinematyczny układ odniesienia. W przypadku niebieskiego systemu odniesienia – punktami definiującymi układ kinematyczny mogą być obiekty niebieskie (gwiazdy lub kwazary) o dobrze wyznaczonej pozycji i o dokładnie określonym ruchu własnym. W przypadku zaś ziemskiego systemu odniesienia – jako punkty definiujące układ kinematyczny przyjmowane są stacje, na których przez co najmniej kilka lat wykonywane były permanentne obserwacje o wysokiej jakości, opracowywane następnie w ramach programów monitorowania układu odniesienia.
Układy odniesienia mogą być również zdefiniowane dynamicznie. Definicja dynamiczna układu oparta jest na równaniach ruchu ciał Układu Słonecznego, z ewentualnym uwzględnieniem sztucznych satelitów Ziemi, których argumentem jest czas dynamiczny (Kryński, 2004b).
Profesor Jan Kryński był kierownikiem Zakładu Geodezji i Geodynamiki w Instytucie Geodezji i Kartografii w Warszawie
Opracowanie 2006
| 












 nadchodzące wydarzenia
nadchodzące wydarzenia
 zobacz pozostałe
zobacz pozostałe


