|
Laserem z drona
Kilka lat temu dynamiczny rozwój systemów/platform bezzałogowych statków powietrznych (SBSP) odmienił rynek opracowań bazujących na klasycznej fotogrametrii lotniczej. Teraz nową rewolucję przynosi technologia bezzałogowego skanowania laserowego (ULS).
W fotogrametrii niskopułapowej bardzo kosztochłonną pracę wykwalifikowanych operatorów stacji fotogrametrycznych zastąpiono automatycznymi metodami dopasowania zdjęć lotniczych w celu generowania chmur punktów 3D (IPC, image point cloud). Dodatkowo rozwiązania pomiarowe bazujące na nawigacji GNSS pozwalają na ograniczenie liczby sygnalizowanych fotopunktów (GCP), co przyspiesza wykonywanie opracowań i obniża ich koszty. Wykorzystanie rozwiązań GNSS-RTK czy PPK (post-processing kinematic) pozwala dziś na osiąganie kilkucentymetrowej dokładności orientacji bezwzględnej (EO) stereomodeli zdjęć SBSP, a tym samym generowanie precyzyjnych chmur punktów 3D z automatycznego przetwarzania tysięcy par zdjęć.
O ile jednak w przypadku budynków czy dróg wykazujących pewną planarność nie ma większych problemów z generowaniem chmur IPC, to na obszarach z roślinnością czy infrastrukturą energetyczną często dochodzi do błędów dopasowania zdjęć i w efekcie powstania lub generowania błędnych modeli 3D. Brak możliwości sklasyfikowania gruntu sprawia, że nawet fotogrametria niskiego pułapu wsparta wysokorozdzielczymi kamerami RGB (np. 42 Mpx) nie jest w stanie zapewnić odpowiednich danych – np. w celu wygenerowania numerycznego modelu terenu (NMT) w monitorowaniu wałów przeciwpowodziowych porośniętych gęstą roślinnością.
Ograniczenia te nie dotyczą jednak sensora lidar. Za technologią bezzałogowego skanowania laserowego, określaną mianem ULS (Unmaned Laser Scanning), stoi rozwój i miniaturyzacja urządzeń skanujących (np. skaner LIVOX AVIA), rozwój systemów GNSS oraz IMU, nowe jednostki nawigacji bezwładnościowej (INS), a także rozwiązania SBSP (np. VTOL).

1. Wizualizacja chmury punktów ULS fragmentu linii energetycznych (pozyskanej przy użyciu Qube 240)
ULS – jak to działa?
Nadawanie tzw. bezpośredniej georeferencji (DG, Direct Georeferencing) pozyskiwanym chmurom punktów lidar czy też określanie parametrów orientacji zewnętrznej (EO) kamery cyfrowej może być już realizowane bez stosowania GCP. Oczywiście w celu kontroli albo do procesu kalibracji kamery wykonawcy sygnalizują GCP w terenie, jednak liczba tych punktów jest niewielka. Systemy nadawania bezpośredniej georeferencji, jak np. POS AV (Applanix), umożliwiają efektywne pozyskiwanie geodanych. W przypadku jednostki IMU, jedyną czynnością z zakresu inicjalizacji jest wykonanie przed samą misją ULS przelotu po osi ósemki, podczas którego jednostka się kalibruje. Ponadto trzeba pamiętać, że w czasie misji ULS oraz przed i po zakończeniu akwizycji chmur punktów stacja bazowa GNSS musi jakiś czas zbierać obserwacje.
Pozyskanie chmur punktów ULS realizowane jest podczas nalotu w szeregach (czasem krzyżowych) z pułapu 60-120 m AGL. Wyrównanie szeregów i nadanie georeferencji chmurom punktów realizowane jest w specjalistycznym oprogramowaniu z wykorzystaniem wskazań jednostki IMU, obserwacji GNSS (po post-processingu) oraz płaszczyzn dachów (np. TerraMatch UAV; Terrasolid).
Chmury punktów ULS charakteryzują się dokładnością 2-3 cm (Z) oraz gęstością
80-300 pkt/m kw. (w zależności od pokrycia szeregów i wysokości lotu AGL) i mogą być wykorzystane do generowania precyzyjnych modeli wysokościowych (NMT, NMPT czy zNMPT). Technologia ULS umożliwia tworzenie modeli terenów pokrytych wysoką roślinnością dzięki penetracji warstwy koron drzew i krzewów przez wiązkę lasera. Pozwala też na detekcję i wektoryzację linii energetycznych, generowanie modeli 3D budynków, obliczanie objętości mas ziemnych w procesie planowania i monitorowania inwestycji realizowanych coraz częściej w technologii BIM (building information modeling).
Zastosowania ULS
ULS sprawdzi się m.in. w monitoringu infrastruktury energetycznej. Wektoryzacji podlegają wówczas słupy, kable, izolatory, stacje transformatorowe i inne elementy infrastruktury (fragment linii energetycznej na rys. 1, a sklasyfikowanej chmury punktów linii energetycznych – na rys. 7). Inne przykłady wykorzystania ULS to modelowanie pojedynczych drzew i drzewostanów, określanie statyki drzew, monitorowanie osuwisk czy wydobycia w kopalniach odkrywkowych lub badanie struktury roślinności czy upraw rolniczych.
Wdrożenie systemów ULS przynosi takie korzyści, jak: duża oszczędność czasu pozyskania danych 3D, uniezależnienie się od warunków oświetleniowych (w projektach, w których wykonanie zdjęć RGB nie jest wymagane), brak konieczności sygnalizowania GCP (wykorzystanie DG) oraz automatyzacja procesów klasyfikacyjnych chmur punktów 3D i generowania modeli wysokościowych (NMT lub NMPT).
Grupa kapitałowa ProGea 4D i ProGea Sky Sp. z o.o. – tworzące od wielu lat rynek usług lidar – zdecydowały o rozpoczęciu dystrybucji systemów ULS z półki „economy” przeznaczonych dla firm geodezyjnych czy instytutów badawczych i uczelni. Obecnie ProGea Sky oferuje rozwiązania firm Quantum Systems i Yellowscan (skaner Qube 240) oraz innowacyjne systemy ULS firmy Geosun.
Wysoka wydajność i precyzja Qube 240
Skaner Qube 240 (rys. 2) to ultralekki i kompaktowy system ULS, będący wynikiem integracji:
- skanera laserowego nowej generacji LIVOX AVIA (720 tys. pkt/s przy 3 rejestrowanych odbiciach; dwa typy śladu wiązki),
- precyzyjnego systemu pozycjonowania POS służącego do bezpośredniego nadawania georeferencji (DG) pozyskiwanym chmurom punktów 3D; jest to połączenie satelitarnego systemu określania pozycji (GNSS) i bezwładnościowej nawigacji (APX-15 UAV, Applanix) rejestrującej kąty skręcenia platformy oraz wartości przyspieszenia i kierunek przemieszczania się platformy.
Jednostka Qube 240 powstała w wyniku współpracy firm Quantum Systems oraz YellowScan. Zamontowana w przedziale fotogrametrycznym VTOL Trinity F90+ jest w stanie w ciągu 60-minutowego lotu na 1 baterii pozyskać chmurę o gęstości 80- 100 pkt/m2 dla około 100 ha. Pierwsze demonstracje systemu Qube 240 potwierdziły osiąganie dokładności na poziomie 2-3 cm (rzędna Z).
Oprogramowanie Applanix POSPacTM UAV umożliwia precyzyjny postprocessing danych POS. Dokładności wyrównania i nadawania georeferencji chmurom punktów można jeszcze podnieść, stosując np. oprogramowanie TerraMatch UAV (Terrasolid). Więcej szczegółów dotyczących systemu i przykładów zastosowania można znaleźć na stronie www.progeasky.pl.

2. System ULS Qube 240 dla VTOL Trinity F90+

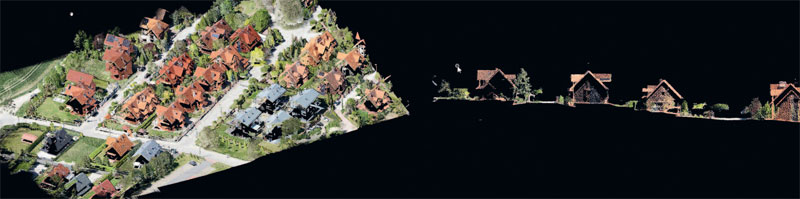
3. Powyżej: modele 3D budynków, po lewej: sklasyfikowana chmura punktów ULS Qube 240 (Terrasolid; TerraScan)
Nisza dla kompaktowych systemów ULS
Firma Geosun, bazując na innowacyjnych technologiach producentów skanerów laserowych (np. LIVOX, Vellodyne czy HESAI), projektuje ultrakompaktowe systemy ULS z własnymi systemami INS i oprogramowaniem do nadawania bezpośredniej georeferencji chmurom punktów. Rozwiązania ULS Geosun można zintegrować m.in. z platformami DJI M300 oraz DJI M600. Nadają się one też do konstruowania własnych systemów mobilnego skanowania laserowego (MLS, Mobile Laser Scanning). Systemy ULS Geosun pozwalają na osiągnięcie dokładności na poziomie nawet 2-3cm. Elementy składowe przykładowego systemu GS-260P to:
- skaner laserowy nowej generacji (LIVOX AVIA),
- precyzyjny system pozycjonowania – odbiornik satelitarny (GNSS) oraz jednostka IMU AGS 303 (STIM300),
- kamera cyfrowa RGB (opcjonalnie).
Skaner laserowy LIVOX AVIA pozwala na pozyskanie do 720 tys. pkt/s przy rejestracji 3 odbić (ech sygnału). Wykorzystanie autorskiego rozwiązania POS (INS AGS 303; Geosun) skutkuje osiągnięciem dokładności rzędu nawet 2 cm. System ULS Geosun umożliwia pozyskanie chmury punktów 3D o gęstości do 170 pkt/m kw. (przy wysokości lotu 100 m AGL i prędkości platformy BSP 10 m/s). W ofercie ProGea Sky znajduje się obecnie 10 systemów ULS Geosun różniących się modelami skanera laserowego oraz IMU (szczegóły na stronie www.progeasky.pl).

4. Rodzina produktów ULS firmy Geosun Navigation

5. System skanowania laserowego ULS GS-260P (Geosun)

6. System ULS GS-260P (Geosun) z kamerą Sony RX1RII zamontowany na wirnikowcu DJI M600Pro
Proces opracowania i przetwarzania chmur
Przetwarzanie chmur punktów ULS jest relatywnie szybkie i częściowo zautomatyzowane dzięki takim programom, jak: POSPacTM UAV (Applanix) oraz Cloud Station (YellowScan) w przypadku systemu Qube 240, a także POS – Geosun Shuttle oraz Geosun gAirHawk (Geosun Navigation). Klasyfikację chmury punktów ULS, jej wektoryzację (np. budynki 3D – rys. 3, linie energetyczne – rys. 7) oraz analizy przestrzenne można wykonywać m.in. w oprogramowaniu TerraScan UAV, TerraModeler UAV czy TerraPhoto UAV (Terrasolid).
Rys. 7. Chmura punktów ULS lidar pozyskana systemem GS-260P i pokolorowana przy użyciu zdjęć z kamery Sony RX1RII (42 Mpx)
ULS trafia pod strzechy
Wszystko wskazuje na to, że kompaktowe skanery laserowe, takie jak LIVOX AVIA, przyczynią się do szybkiej popularyzacji systemów ULS w wybranych pracach geodezyjnych, tj. tam, gdzie akceptowalne są dokładności rzędu kilku cm, liczy się krótki czas realizacji prac czy panują niekorzystne warunki oświetleniowe. Niewątpliwie pozyskiwanie chmur punktów w obszarach zalesionych czy zadrzewionych przyniesie wiele korzyści związanych z precyzyjnymi modelami terenu czy modelami pokrycia terenu. Jedynie kwestią czasu pozostaje dodatkowe wykorzystanie systemów ULS do realizacji autonomicznych misji SBSP.
| 












 nadchodzące wydarzenia
nadchodzące wydarzenia
 zobacz pozostałe
zobacz pozostałe


