|
Trójwymiarowe Opole
Urząd Miasta Opola zdecydował się w ubiegłym roku na zakup drona. Co skłoniło magistrat do tej inwestycji i jakie przyniosła już korzyści? Na te pytania odpowiadają pracownicy urzędu, którzy wykorzystują bezzałogowca w codziennej pracy.
Zamawiane przez nas dotychczas produkty (ortofotomapy, chmury punktów) spełniały wprawdzie nasze wymogi jakościowe, jednak czas, jaki upływał od ich zamówienia w ramach postępowania przetargowego do dostarczenia, pozostawiał wiele do życzenia. Posiadanie własnego sprzętu pozwala nam szybko reagować na potrzeby chwili, jak np. weryfikacja zasięgu wezbrania rzeki Odry czy przygotowanie aktualnej ortofotomapy do sporządzenia miejscowego planu zagospodarowania przestrzennego.

Opolski rynek w chmurze punktów
Jakiej platformy używamy?
Opole, miasto o powierzchni 149 km2, to nie lada wyzwanie dla bezzałogowca. Biorąc pod uwagę warunki pogodowe, w ciągu dnia znajdziemy 2-3 godzin równomiernego nasłonecznienia miasta na wykonanie nalotów. Do takiego zadania potrzebny jest wydajny system. Dlatego też zdecydowaliśmy się na płatowca z modułem RTK, który umożliwia mapowanie stosunkowo dużego obszaru w krótkim czasie.
W ogłoszonym przetargu najkorzystniejszym rozwiązaniem okazał się płatowiec szwajcarskiej firmy Sensefly – model eBee X RTK BVLOS z kamerą S.O.D.A 3D. Dron ten pozwala na obfotografowanie około 250-hektarowego obszaru podczas jednego lotu. Dzięki pozycjonowaniu RTK możemy ograniczyć liczbę markowanych w terenie fotopunktów, a nawet w niektórych przypadkach w ogóle z nich zrezygnować (wtedy kontrolowane są jedynie elementy o znanych już współrzędnych). Bardzo zwiększa to efektywność naszej pracy.

Pracownica UM Opola z dronem Sensefly eBee X RTK BVLOS
Ważnym kryterium wyboru UAV (unmanned aerial vehicle) do naszej pracy była kamera. Producent, jako jedyny na świecie, posiada rozwiązanie przeznaczone do modelowania 3D – kamerę S.O.D.A 3D. Sensor ten zamiast jednego zdjęcia pionowego wykonuje trzy – 1 pionowe oraz 2 ukośne. Dzięki temu zyskujemy większe pokrycie terenu oraz gęstszą chmurę punktów w takich miejscach, jak elewacje budynków. W obszarze bez gęstej zabudowy można zmniejszyć pokrycie poprzeczne nalotu, gdyż zdjęcia ukośne pozwalają obfotografować znacznie większy obszar. Płatowiec wyposażony jest też w moduł BVLOS do wykonywania misji poza zasięgiem wzroku.
Postprocessing danych
Do przetworzenia danych wykorzystujemy oprogramowanie Pix4Dmapper. Geotagowane zdjęcia (dzięki modułowi RTK oraz strumieniowi poprawek ze stacji TPI Opole) mają dobrze zlokalizowane środki rzutów i określone błędy położenia. Obliczenia w programie Pix4D można podzielić na trzy zasadnicze etapy:
- I – tzw. proces inicjalny polegający na wpasowaniu zdjęć wraz z automatycznym określeniem punktów wspólnych i ewentualnym wczytaniem GCP (fotopunktów i punktów kontrolnych);
- II – generowanie chmury punktów, jej automatyczna klasyfikacja oraz, ewentualnie, tworzenie modelu mesh;
- III – tworzenie NMT, NMPT oraz ortofotomapy.
W naszym przypadku podczas jednego dnia nalotów pozyskujemy zazwyczaj od 4 do 6 tys. zdjęć, choć zdarzyło się i 8 tys. Następnie wczytujemy je do oprogramowania i uruchamiamy etap I. Do etapów II i III przechodzimy po kilku kolejnych dniach nalotów i zebraniu większej ilości materiału, z których tworzymy jeden projekt. Obejmuje on zazwyczaj obręb, dzielnicę czy obszar tworzenia MPZP. Dla takiego terenu generujemy sklasyfikowaną chmurę punktów, NMT, MNPT oraz ortofotomapy. Obecnie zazwyczaj nie tworzymy modelu mesh. Warto zauważyć, że 1 zdjęcie zajmuje około 20 MB, a cały projekt po przetworzeniu i wytworzeniu produktu końcowego „waży” 3-4 razy więcej niż same fotografie źródłowe. Ortofotomapa jest następnie udostępniana na portalu miasta Opola znajdującym się pod adresem https://arcgisportal.um.opole.pl oraz planistom, a także wydziałom UM Opola, w porozumieniu z którymi dany obszar został odwzorowany.
Ze względu na potrzeby i charakter naszej pracy zwykle nie weryfikujemy i nie poprawiamy manualnie klasyfikacji chmury punktów. Na początku poświęciliśmy sporo czasu na wypracowanie optymalnych scenariuszy lotów w celu uzyskania dobrej jakości generowanych automatycznie produktów przy jednoczesnym pokryciu nalotem możliwie dużego obszaru. Nasz referat składa się z 4 pracowników (w tym 2 pilotów), którzy poza czynnościami związanymi z lotami i opracowywaniem wyników zajmują się wieloma innymi zadaniami. Dlatego dodatkowe prace manualne są niemal niemożliwe.
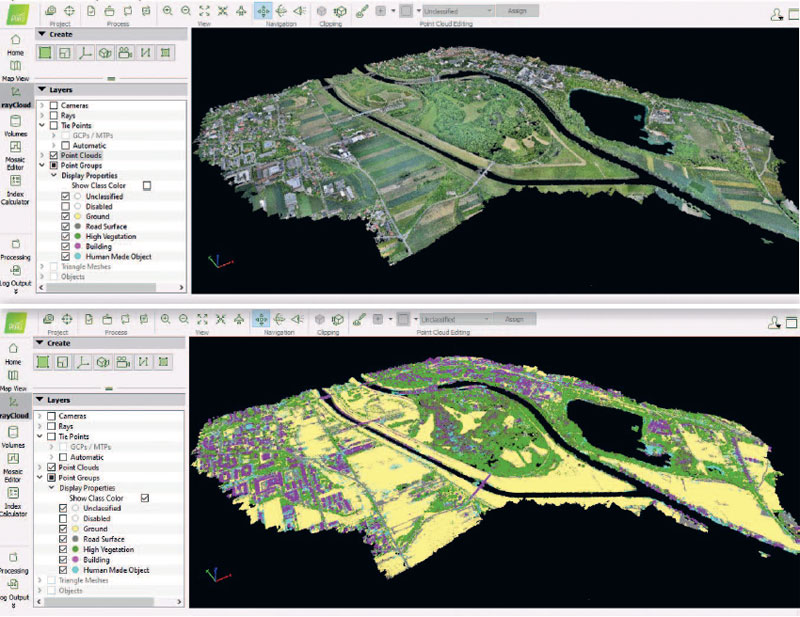
Fragment Opola na niesklasyfikowanej (górna ilustracja) i sklasyfikowanej chmurze punktów (dolna)
Co dalej?
Obecnie skupiamy się na zakończeniu wykonywania ortofotomapy dla całego miasta. Opracowanie nie będzie miało jednolitego wyglądu, nie powstanie w ciągu jednego dnia lub dwóch, czy nawet kilku tygodni. Jest ono wykonywane na bieżąco w ramach zgłaszanych potrzeb. Przy sprzyjających warunkach atmosferycznych na drugi dzień po zgłoszeniu możemy przekazać gotowy produkt (ortofotomapę, zdjęcia ukośne, NMT itp.). To jest główna zaleta posiadania własnego drona. Ortofotmapę całego miasta i inne „globalne” opracowania można pozyskać z GUGiK-u, dublowanie zamówień publicznych jest bezcelowe.
Po utworzeniu ortofotomapy i pozyskaniu chmury punktów dla całego miasta będziemy mogli pomyśleć o wykonaniu modeli 3D budynków i budowli, np. w standardzie LoD 2. Dane z projektu CAPAP w tym zakresie pozostawiają wiele do życzenia (brakuje choćby symbolu Opola, jakim jest Wieża Piastowska).
Ponadto posiadanie aktualnej ortofotomapy umożliwia – w połączeniu z danymi z ewidencji gruntów i budynków oraz z Wydziału Budownictwa, do którego trafiają wnioski o wydanie pozwoleń na budowę oraz zgłoszenia zamiaru budowlanego – wykrycie samowoli budowlanych już na wczesnym etapie ich powstawania. Na większą skalę, lecz mniej dokładnie, takie opracowania wykonujemy na podstawie całościowych danych z GUGiK-u.
Posiadamy ponadto kamerę multispektralną, z której na ogólnodostępnym portalu nie prezentujemy opracowań, lecz zebrane dane zamierzamy wykorzystać w procesach uczenia maszynowego. Chcemy w ten sposób dalej zgłębiać wiedzę o naszym mieście i zachodzących w nim procesach (zwłaszcza o kondycji roślinności i „zabetonowywaniu” przestrzeni). Zebrane na przestrzeni lat dane pozwolą na wyciągnięcie wniosków i ewentualne przeciwdziałanie tym procesom, o ile faktycznie takie w Opolu zachodzą.
Artykuł ukazał się w bezpłatnym niezbędniku sprzętowym DRONY DLA GEODETY 2020
| 













 nadchodzące wydarzenia
nadchodzące wydarzenia
 zobacz pozostałe
zobacz pozostałe


