|
Kryteria czasu, ceny i dokładności
Dobór technologii pomiarowej odpowiedniej do danego zlecenia jest jednym z wyzwań, z jakimi zmaga się każdy geodeta. Jak uzyskać produkt o wymaganej dokładności przy minimalnym nakładzie finansowym i czasowym?
Wraz z rozwojem sprzętu pomiarowego technologie prac geodezyjnych stały się bardziej przyjazne dla użytkownika, w wyższym stopniu zautomatyzowane oraz szybsze, przy jednoczesnym utrzymaniu odpowiedniej jakości oraz dokładności. Do nowoczesnych rozwiązań ułatwiających pomiary bez wątpienia należą: naziemny skaning laserowy oraz pomiar fotogrametryczny z wykorzystaniem bezzałogowych statków powietrznych (BSP).
W sieci oraz w czasopismach naukowych i branżowych można znaleźć wiele artykułów na temat zalet oraz ograniczeń obu tych technologii. Z publikowanych analiz wynika jednoznacznie, że dokładności otrzymane z wykorzystaniem fotogrametrii są zbliżone do tych, które geodeta uzyskuje podczas pomiaru odbiornikiem GNSS. Natomiast naziemny skaning laserowy można pod tym względem porównać z tradycyjnymi pomiarami tachimetrycznymi, w których ważny jest każdy milimetr. Przyjmując takie założenia, w niniejszym opracowaniu nie przeprowadzamy głębszej analizy dokładności, tylko skupiamy się na przedstawieniu procesu pozyskania danych, wizualizacji otrzymanych chmur punktów oraz poniesionych kosztów i nakładu pracy.
Miejsce eksperymentu
Badany obszar obejmuje fragment kampusu Wydziału Ekonomiczno-Socjologicznego Uniwersytetu Łódzkiego o wymiarach 120 m x 150 m (rys. 1). Jest to teren o typowo miejskiej charakterystyce, a zatem analizowane technologie pomiarowe zostały sprawdzone w środowisku, w którym często prowadzone są prace geodezyjne. Znajdują się tam budynki niskie (do 4 kondygnacji nadziemnych) oraz średnio wysokie (5-8 kondygnacji nadziemnych). Dodatkowe utrudnienie stanowiły szklane elewacje gmachów oraz wysokie drzewa. Zarówno pomiar skanerem, jak i pomiar fotogrametryczny zaplanowano tak, aby zoptymalizować czas pracy, ale jednocześnie zrealizować określone potrzeby oraz zachować dokładność opracowania.
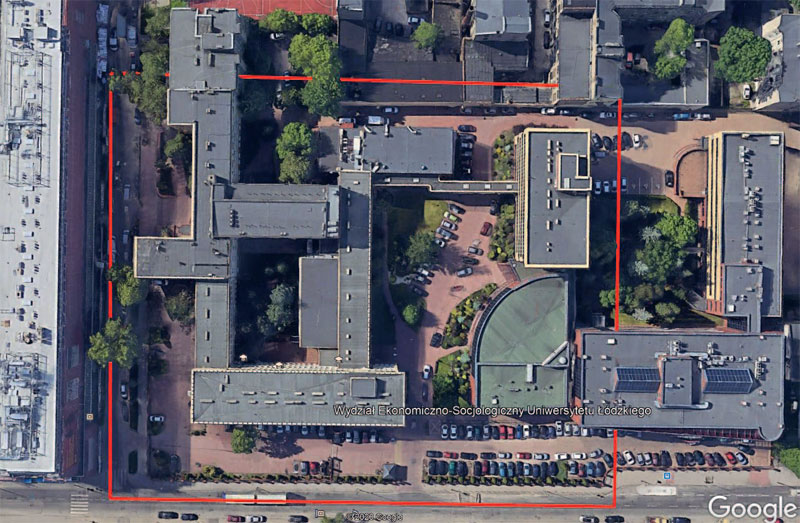
Rys. 1. Obszar nalotu na tle ortofotomapy
Pomiary – naziemny skaning laserowy
Skanowanie z wykorzystaniem skanera Trimble TX8 zostało przeprowadzone na 62 stanowiskach. Wykonanie jednego skanu wraz ze zdjęciami cyfrowymi trwało 5 minut. Tak wysoka liczba stanowisk podyktowana była chęcią jak najbardziej realistycznego odwzorowania wszystkich, nawet najmniejszych elementów, w tym: schodów, barierek, koron drzew czy wnęk między budynkami. Ponadto dążono do uzyskania odpowiednio wysokiego pokrycia między stanowiskami, które na etapie opracowania danych pozwoliłoby na automatyczne połączenie skanów na podstawie wspólnych płaszczyzn.
Na każdym stanowisku wykonano przynajmniej jeden skan 360° x 317° na poziomie 2 (odstęp między punktami dla odległości 30 m wynosił 11,3 mm) oraz wbudowaną kamerą cyfrową zdjęcia panoramiczne, które posłużyły do późniejszego pokolorowania chmur punktów. Na nielicznych stanowiskach wystąpiły przeszkody terenowe w postaci przejeżdżających aut lub przechodzących ludzi, co skutkowało koniecznością wykonania kilku skanów uzupełniających.
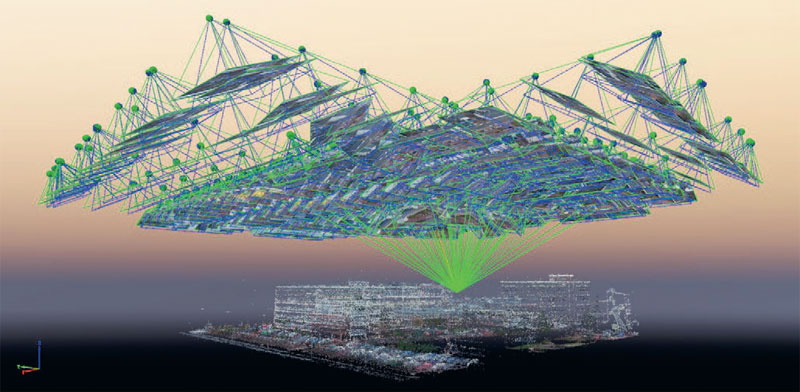
Rys. 2. Rzadka chmura punktów wiążących (sparse cloud) wraz ze zdjęciami po procesie aerotriangulacji
Pomiary – metoda fotogrametryczna BSP
Nalot fotogrametryczny z wykorzystaniem drona DJI Phantom 4 RTK przeprowadzono na wysokości 50 m powyżej powierzchni terenu (AGL). Z powodu dużej liczby drzew oraz wysokich budynków wybrano nalot w trybie „Multi-oriented”, czyli podzielono misję na 5 „podmisji”. Podczas pierwszej kamera wykonuje zdjęcia pionowe („patrzy” prostopadle w dół), kolejne to już zdjęcia ukośne wykonywane z 4 stron obiektu (wybrano kąt 60°). Pokrycie podłużne zdjęć wynosiło 80%, a poprzeczne – 70%. Cały nalot trwał 35 minut, wykorzystano 1,5 baterii.
W rezultacie powstało 427 zdjęć o łącznej objętości 3,5 GB. Dron podczas nalotu korzystał z danych korekcyjnych sieciowych RTN systemu ASG-EUPOS, ze strumienia RTN4G_VRS_RTCM32, odbierając obserwacje z czterech konstelacji satelitów (GPS + Galileo + GLONASS + BeiDou).
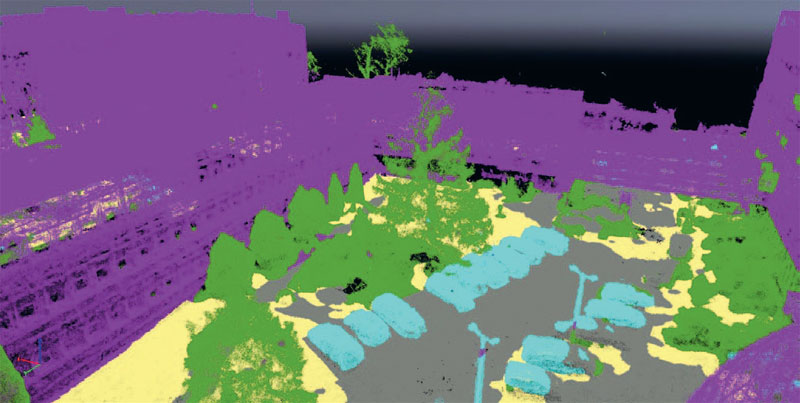
Rys. 3. Klasyfikacja chmury punktów ze zdjęć
Opracowanie danych – skaning
W celu wykonania wiarygodnej analizy czasowej dla obydwu metod pomiarowych do obróbki danych wykorzystano te same komputery wyposażone w procesor Intel i7 9th, 32 GB pamięci RAM oraz kartę graficzną Nvidia GeForce 1060. W dalszej części artykułu porównaniu poddano tylko i wyłącznie chmury punktów.
Dane uzyskane z naziemnego skanera TX8 zostały przetworzone w oprogramowaniu Trimble RealWorks w trzech etapach:
- Sampling. Bezpośrednio po zaimportowaniu projektu ze skanera przeprowadzono próbkowanie. Proces ten służy do ujednolicenia rozdzielczości chmury punktów.
- Autorejestracja skanów. Jest to procedura polegająca na połączeniu wszystkich stanowisk w jednym wspólnym układzie współrzędnych.
- Czyszczenie chmury punktów. Ostatnim etapem, najbardziej pracochłonnym i wymagającym czynnego udziału operatora, było usunięcie z chmury punktów wszystkich zbędnych elementów (przejeżdżające samochody, przechodzący ludzie), pozbycie się szumów związanych z oszklonymi budynkami oraz przeprowadzenie autoklasyfikacji chmury punktów na warstwy: budynki – building, roślinność – high vegetation, grunt – ground, pozostałość – remaining, w celu uzyskania lepszego efektu wizualnego.
Opracowanie danych – BSP
Z trzech etapów składało się również przetworzenie danych obrazowych pozyskanych z BSP. Zostało ono wykonane w oprogramowaniu Pix4Dmapper:
- Aerotriangulacja (potocznie zwana „łączeniem zdjęć”) wraz z analizą dokładności. Po utworzeniu nowego projektu zaimportowano zdjęcia, wybrano odpowiednie układy współrzędnych oraz wykonano proces aerotriangulacji – Initial Processing (rys. 2). Wyrównanie wykonano tylko z wykorzystaniem współrzędnych środków rzutów zdjęć. Nie użyto ani jednego fotopunktu (GCP). Następnie wykonano sprawdzenie dokładności na 10 punktach kontrolnych, otrzymując błąd średniokwadratowy (RMSE) 2 cm zarówno dla osi X, jak i Y. Natomiast dla osi Z stwierdzono stałe przesunięcie wysokościowe modelu o około 20 cm, które można byłoby usunąć za pomocą jednego punktu GCP, co zostało już opisane w naszym artykule pod tytułem „BSL z RTK. Czy warto?” (DRONY DLA GEODETY 2019).
- Dense matching – generowanie gęstej chmury punktów. Proces ten polega na porównaniu nakładających się ze sobą obrazów w celu odnalezienia cech wspólnych. W rezultacie otrzymujemy gęstą chmurę punktów. Po ustawieniu odpowiednich parametrów przetwarzania kończy się rola operatora, a pracę zaczynają algorytmy dopasowania. W większości przypadków proces ten trwa nawet kilka godzin. Czas opracowania zależy od liczby zdjęć, wielkości obszaru, wybranych ustawień oraz mocy obliczeniowej komputera.
- Manualna korekta automatycznej klasyfikacji. Program Pix4Dmapper automatycznie wykonuje klasyfikację chmury punktów, m.in. na podstawie wykrywania płaszczyzn, zmian wysokości oraz barw punktów (rys. 3). Odpowiedzialne za klasyfikację algorytmy sztucznej inteligencji cały czas podlegają uczeniu maszynowemu (machine learning), zwiększając swoją efektywność. W zależności od obiektu poprawność przypisania punktów do odpowiednich klas sięga nawet 90%. W naszym przypadku analizę utrudniły oszklone elewacje budynków oraz bliskie sąsiedztwo drzew.
Uzyskane chmury punktów
Technologia naziemnego skaningu laserowego sprowadza się do gromadzenia w stosunkowo krótkim czasie dużej ilości danych przestrzennych w postaci chmury punktów. Dane te cechuje wysoka szczegółowość oraz dokładność w odwzorowaniu otoczenia.
W fotogrametrii niskiego pułapu gęsta chmura punktów jest tak naprawdę jednym z produktów pośrednich. Wiele osób, pytając o technologię zdjęć z bezzałogowych statków powietrznych, skupia się przede wszystkim na produkcie końcowym, jakim jest ortofotomapa. Nie zdają sobie przy tym sprawy, że w trakcie jej tworzenia otrzymujemy tak wartościowy produkt, jak gęsta chmura punktów. Ma ona zastosowanie między innymi w:
- tworzeniu modeli 2D/3D,
- opracowaniu map topograficznych oraz NMT/NMPT,
- wykonywaniu przekrojów i rzutów,
- pomiarach objętości hałd oraz określaniu bilansu robót ziemnych,
- dokumentowaniu prac archeologicznych,
- monitorowaniu oraz analizie postępu prac budowlanych,
- inwentaryzacji oraz rekonstrukcji budynków i zabytków,
- wizualizacji 3D miast i budynków,
- tworzeniu wirtualnych wycieczek, filmów, reklam itp.
We wszystkich wymienionych przykładach oraz wielu innych zastosowaniach (możliwości są praktycznie nieograniczone) świetnie sprawdzi się zarówno chmura punktów uzyskana w wyniku skanowania 3D (rys. 4), jak i ta stworzona na podstawie zdjęć z bezzałogowego statku powietrznego (rys. 5).

Rys. 4. Chmura punktów z naziemnego skanowania laserowego

Rys. 5. Chmura punktów wygenerowana na podstawie zdjęć z drona
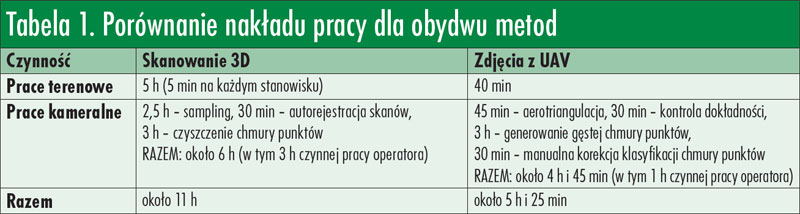
Nakład pracy
Nie ulega wątpliwości, że atutem obydwu badanych metod (w porównaniu z pomiarami tachimetrycznymi lub GNSS) jest oszczędność czasu pozyskania danych o wysokiej rozdzielczości. Ponadto do odwzorowania obszaru o dużej powierzchni wystarczy jedna osoba i jeden wyjazd terenowy. Z drugiej strony rośnie ilość czasu niezbędnego do opracowania materiału w biurze, który zależy przede wszystkim od mocy obliczeniowej komputera.
W tabeli 1 znajduje się zestawienie czasu potrzebnego do uzyskania chmury punktów dla badanego obszaru. Nie uwzględniono w niej procesu nadawania georeferencji chmurze punktów wymagajacego pomiaru tradycyjnymi metodami geodezyjnymi. W przypadku metody fotogrametrycznej z wykorzystaniem BSP wyposażonego w technologię RTK wystarczy pomiar jednego punktu GCP odbiornikiem GNSS. W przypadku skaningu w celu uzyskania odpowiednich dokładności oraz georeferencji należałoby pomierzyć przynajmniej dwa punkty tachimetrem.
Co lepsze?
Analiza wizualna obu chmur punktów wykazała, że dla obiektów poziomych (dróg, trawników, chodników, dachów itp.) chmura ze zdjęć wykonanych przy użyciu BSP wygenerowana w programie Pix4Dmapper jest lepsza jakościowo oraz bardziej kompletna niż ta pozyskana metodą skaningu 3D. Przyczyniła się do tego m.in. duża liczba pojazdów skutkująca powstaniem martwych pól oraz brak informacji na temat dachów budynków.
Z kolei dla obiektów pionowych – budynków lub małych elementów infrastruktury, takich jak barierki czy słupy – chmura uzyskana metodą fotogrametryczną jest obarczona o wiele większymi szumami niż ta ze skanowania. Dodatkowo, rozpatrując sam aspekt wizualny, można stwierdzić, że wbudowana kamera cyfrowa w skanerze Trimble TX8 znacznie gorzej sprawdziła się w kolorowaniu chmury punktów niż ta zamontowana na pokładzie Phantoma 4 RTK, czego rezultatem było otrzymanie mniej wyraźnych tekstur.
Nakład pracy potrzebnej do zgromadzenia niezbędnych danych w terenie był znacznie większy w przypadku technologii skanowania 3D. Jednak produktem, jaki uzyskujemy bezpośrednio po skanowaniu, jest gotowa chmura punktów, na której praktycznie od razu możemy wykonać szczegółowe analizy. W przypadku fotogrametrii lotniczej musimy wykonać kilka przetworzeń, po zakończeniu których otrzymujemy dopiero końcowy produkt fotogrametryczny.
Analizując czas poświęcony na prace terenowe i kameralne (z uwględnieniem rozdzielczości oraz jakości danych przestrzennych uzyskanych prezentowanymi technologiami), można śmiało stwierdzić, że obie metody znacznie przewyższają możliwościami te tradycyjne. Tym samym mogą pozwolić geodecie na realizację większej liczby zleceń.
Ważnym aspektem, o którym należy jeszcze powiedzieć, jest dokładność odwzorowania. Jako że naziemny skaning laserowy jest pod tym względem zbliżony do tachimetrii, uzyskana chmura punktów umożliwia zaawansowane oraz precyzyjne analizy, np. w geodezji inżynieryjnej i przemysłowej, z którymi prawdopodobnie fotogrametria jeszcze by sobie nie poradziła. Z drugiej strony nie każde zlecenie wymaga od geodety milimetrowej dokładności. Nie ma więc potrzeby od razu strzelać z armaty do wróbla. Jeśli uwzględnimy koszt zakupu sprzętu oraz oprogramowania, dojdziemy do wniosku, że fotogrametria z wykorzystaniem BSP świetnie sprawdzi się w większości prac wykonywanych przez geodetę, takich jak mapa do celów projektowych, bilans robót ziemnych czy wszelkie inwentaryzacje. Ponadto umożliwi wykonanie większej liczby tego typu zleceń oraz przekazanie inwestorom, oprócz suchych map i projektów 2D, również chmur punktów lub modelu 3D Mesh do łatwego i wygodnego monitorowania oraz analizowania postępów prac budowlanych. W tabeli 2 przedstawiamy nasze spostrzeżenia dotyczące obu metod oraz ich porównanie z geodezją klasyczną.
Testowane technologie świetnie poradziły sobie z gromadzeniem danych przestrzennych w postaci gęstej chmury punktów, realistycznie odwzorowując teren Wydziału Ekonomiczno-Socjologicznego Uniwersytetu Łódzkiego. Jednak biorąc pod uwagę trzy kryteria – czas, cenę i dokładność – technologia fotogrametryczna z wykorzystaniem BSP wygrywa naszym zdaniem z naziemnym skaningiem laserowym stosunkiem 2 do 1.

O firmie
Do opracowania fotogrametrycznego wykorzystano zdjęcia z platformy DJI Phantom 4 RTK oraz oprogramowanie Pix4Dmapper. Zestaw ten znajduje się w ofercie firmy NaviGate. Całość uzupełniają szkolenia, zarówno na uprawnienia UAVO VLOS i BVLOS oraz kursy specjalistyczne z fotogrametrii niskiego pułapu oraz teledetekcji prowadzone przez doświadczonych instruktorów Ośrodka Szkoleniowego NaviGate. Zainteresowanych uzyskaniem dostępu do pełnej chmury punktów zachęcamy do odwiedzenia naszego bloga (www.navigate.pl/blog/).
Artykuł ukazał się w bezpłatnym niezbędniku sprzętowym DRONY DLA GEODETY 2020
| 













 nadchodzące wydarzenia
nadchodzące wydarzenia
 zobacz pozostałe
zobacz pozostałe


