|
BSL z RTK. Czy warto?
Bezzałogowy statek powietrzny DJI Phantom 4 RTK cieszy się sporym powodzeniem wśród klientów firmy NaviGate, oficjalnego dystrybutora marki DJI Enterprise w Polsce. W artykule przybliżamy specyfikację tego drona oraz przedstawiamy sposób pozyskiwania za jego pomocą dokładnych opracowań.
Bezzałogowy statek powietrzny DJI Phantom 4 RTK jako pierwszy tej marki posiada możliwość zapisu w metadanych każdego obrazu dokładnych współrzędnych środka rzutu zdjęcia z wykorzystaniem poprawek pochodzących ze stacji referencyjnych. Jak ta funkcja przekłada się w praktyce na sposób planowania nalotów i opracowanie danych? System RTK zintegrowany ze statkiem powietrznym pozwala na zmniejszenie liczby fotopunktów, a w niektórych przypadkach nawet na zupełne z nich zrezygnowanie. W przypadku rezygnacji z pomiaru terenowego należy jednak zachować ostrożność. Nie mając bowiem współrzędnych choćby kilku punktów kontrolnych, jesteśmy pozbawieni możliwości kontroli uzyskanych wyników.

Rys. 1. DJI Phantom 4 RTK
Dokładne środki rzutów w EXIF bez postprocessingu
W odróżnieniu od systemów bazujących na dwóch odbiornikach, z których jeden zamontowany jest na pokładzie bezzałogowca, a drugi pełni rolę odbiornika bazowego, Phantom 4 RTK zapisuje dokładne współrzędne środków rzutów zdjęć już w metadanych EXIF każdej fotografii. Po wczytaniu zdjęć do oprogramowania fotogrametrycznego (np. Pix4Dmapper czy Agisoft Metashape) od razu przystępujemy do pierwszego etapu przetwarzania, w którym następuje wyrównanie bloku zdjęć. Przybliżonych elementów orientacji zewnętrznej zdjęć nie trzeba poddawać postprocessingowi. Po wykonaniu aerotriangulacji, np. w zakładce „Reference”, można odczytać błąd wyrównania bloku zdjęć. Przy zadeklarowanej dokładności ich pozyskania na poziomie 1,5 cm (która również zapisana jest w metadanych), błąd ten wynosi około 1 cm. Dokładność wyznaczana jest podobnie jak w przypadku geodezyjnych odbiorników GNSS. Pomocny jest w tym współczynnik PDOP, który mówi o korzystnej (lub nie) geometrii konstelacji satelitów.
Sensor optyczny
Matryca 1” CMOS, rozdzielczość 20 megapikseli oraz mechaniczna migawka to główne cechy zintegrowanej kamery DJI Phantom 4 RTK. Na szczególną uwagę zasługuje zastosowanie mechanicznej migawki, co znacznie redukuje efekt „rolling shutter” i pozwala na planowanie nalotów z większymi prędkościami bez obawy o efekt „kładzenia się” linii prostych na zdjęciach. Nowością jest ustawienie stałego czasu naświetlania; w celu zachowania spójności ekspozycji na wszystkich zdjęciach automat kieruje pracą przesłony oraz modyfikuje czułość ISO.
Możemy wybrać opcję automatycznego usuwania dystorsji ze zdjęć. Możemy również zapisać oryginalne zdjęcia i pozostawić korekcję zniekształceń zaawansowanym algorytmom oprogramowania fotogrametrycznego (Pix4Dmapper, Agisoft Metashape itp.). Swoim klientom zazwyczaj doradzamy, aby wpływ dystorsji redukować tylko raz – w oprogramowaniu.
Kontroler
Na pierwszy rzut oka kontroler w wersji RTK różni się od swoich poprzedników tylko wbudowanym tabletem. Przyglądając się dokładniej, zauważymy jeszcze dwie różnice. Nowością jest zastosowanie wymiennego akumulatora. Po rozładowaniu kontrolera nie musimy szukać źródła prądu i podłączać aparatury do zasilacza, wystarczy wymienić baterię WB37 (znaną z aparatur sterujących statkami serii DJI Matrice). Możemy to zrobić także w trakcie trwania misji, ponieważ wewnętrzny akumulator o mniejszej pojemności podtrzyma pracę aparatury nawet przez 5 minut.
W celu pobrania poprawek ze stacji referencyjnych konieczne jest połączenie z internetem, wpisanie danych logowania oraz wskazanie strumienia poprawek wybranego serwisu. Dane logowania wpisujemy w aplikacji DJI GS RTK (podobnie jak w odbiornikach geodezyjnych), natomiast połączenie z internetem zapewnia nam modem GSM wielkości pendrive’a, w którym należy umieścić kartę SIM i podłączyć do kontrolera. DJI Phantom 4 RTK jest kompatybilny z państwową siecią stacji referencyjnych ASG-EUPOS, a także z komercyjnymi sieciami VRSNet (Trimble), SmartNet (Leica), TPI NET (Topcon) czy NadowskiNET. Dzięki temu na obszarze Polski nie ma potrzeby stosowania własnych stacji referencyjnych GNSS.
DJI GS RTK APP
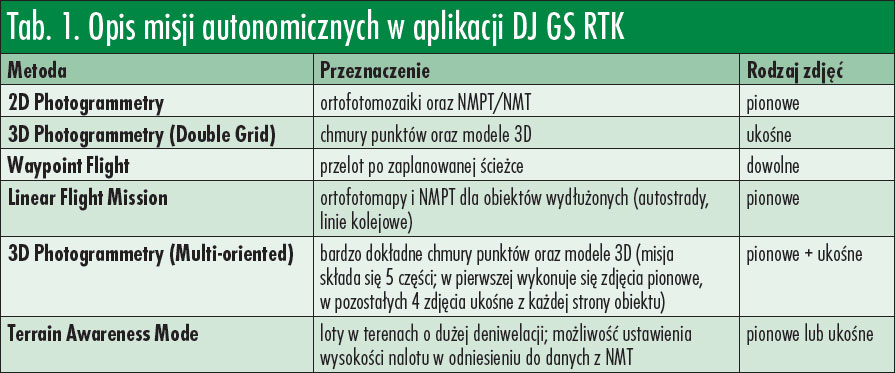
Aplikacja jest podzielona na dwa moduły: wolnego lotu oraz planowania misji autonomicznych. Nalot możemy zaplanować na 6 sposobów w zależności od produktu, jaki chcemy uzyskać lub zróżnicowania obszaru opracowania (tab. 1). Na szczególną uwagę zasługuje tryb „Terrain Awarness Mode”, który pozwala na import NMT w formacie TIF, od którego następnie liczona będzie wysokość nalotu.
Obszar nalotu możemy zdefiniować w terenie na podkładzie mapy satelitarnej Mapbox lub wcześniej w biurze, przygotowując plik KML w układzie WGS84 (np. w aplikacji QGIS lub Google Earth).
Analiza dokładności. Co z fotopunktami?
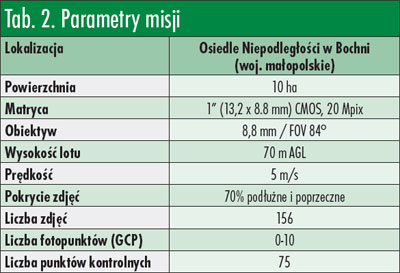
Rzeczywisty błąd położenia, który interesuje geodetów, to RMS (Root Mean Square) na punktach kontrolnych, czyli takich, które są ignorowane przez algorytm wyrównania i służą do obliczenia odchyłek między współrzędnymi pozyskanymi z pomiaru terenowego a współrzędnymi wyestymowanymi przez program. Aby sprawdzić wpływ fotopunktów na dokładność opracowania, wykonano nalot nad 10-hektarowym polem testowym zlokalizowanym w Bochni. Rozmiar matrycy oraz długość ogniskowej w kamerze zintegrowanej z bezzałogowym statkiem DJI Phantom 4 RTK pozwala na uzyskanie 2-centymetrowego piksela terenowego (GSD) przy nalocie na wysokości 70 m (AGL). Ze względu na zróżnicowaną rzeźbę terenu oraz wysokie budynki, przyjęto podłużne i poprzeczne pokrycie zdjęć na poziomie 70%. Prędkość nalotu wyniosła 5 m/s. W trakcie misji wykonano łącznie 156 fotografii.
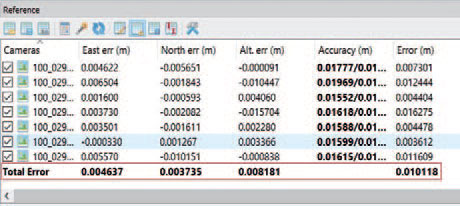
Rys. 2. Błędy środków rzutów zdjęć po wyrównaniu bloku w Agisoft Metashape
W terenie pomierzono, a następnie wskazano na zdjęciach 85 punktów równomiernie rozłożonych na obszarze opracowania. 10 z nich stopniowo włączano do zbioru fotopunktów, natomiast 75 posłużyło do kontroli dokładności (jako tzw. punkty kontrolne). Znajdowały się one zarówno na powierzchni terenu, jak i na dachach budynków. Na poziomie terenu były to głównie studzienki kanalizacyjne, linie parkingowe oraz inne punkty pozwalające na jednoznaczną identyfikację na zdjęciach. Na dachach budynków, z powodu braku charakterystycznych punktów, zamontowano okrągłe tarcze pomiarowe. Punkty pomierzono techniką RTK z wykorzystaniem wirtualnej stacji referencyjnej.
Dokładną analizę zależności wielkości błędu średniokwadratowego (RMS) na punktach kontrolnych od liczby fotopunktów przeprowadzono w programie Pix4Dmapper. Wyniki poszczególnych wyrównań zamieszczono w tabeli 3 i na rys. 3.
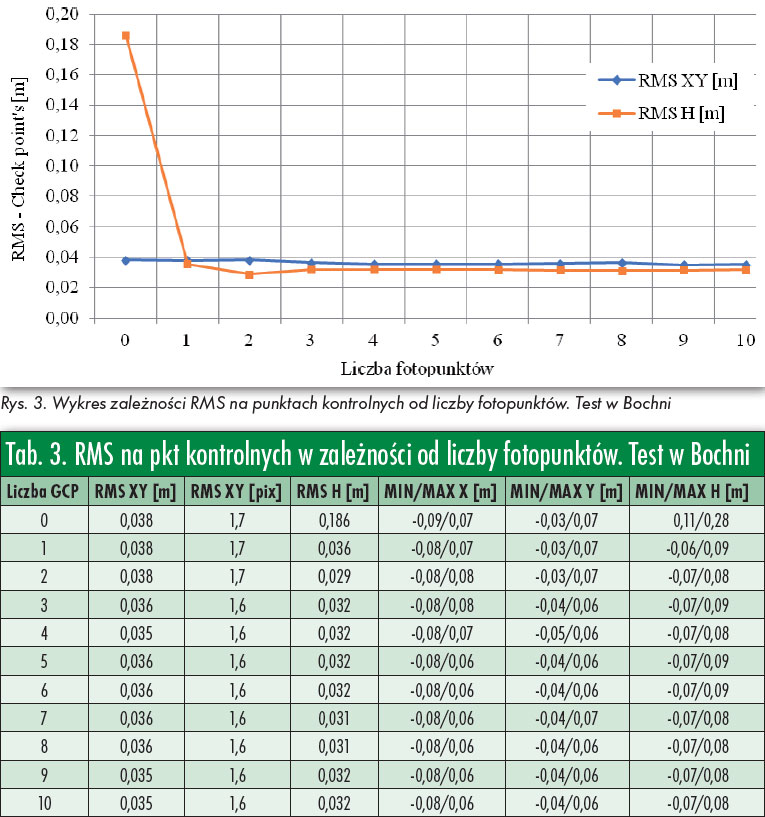
Z analizy wynika, że zastosowanie fotopunktów nie wpływa na wielkość RMS dla współrzędnych płaskich XY. Po przeliczeniu błędu na rozmiar piksela terenowego, który wynosi 2,25 cm, okazuje się, że nie przekracza on 2 pikseli. Natomiast zastosowanie jednego fotopunktu pozwala uzyskać RMS dla współrzędnej H na poziomie 4 cm. W przypadku braku fotopunktów RMS H wyniósł aż 19 cm. Wynika to z tego, że program nie ma wystarczającej ilości danych do prawidłowego przeprowadzenia samokalibracji i wyznaczenia elementów orientacji wewnętrznej, w tym wyznaczenia stałej kamery Ck. Przez to otrzymujemy model, który jest wewnętrznie wysokościowo zgodny, ale bezwzględnie przesunięty w stosunku do fizycznej powierzchni terenu. Dodając jeden fotopunkt, dostarczamy obserwację niezbędną do prawidłowego wyznaczenia Ck, co w wyniku daje model zgodny zarówno w wysokości względnej, jak i bezwzględnej. Zastosowanie 2 i więcej fotopunktów w tym przypadku nie wpływa istotnie na wielkość błędu na punktach kontrolnych.
Rys. 4. Rozkład błędów na punktach kontrolnych. Test w Bochni
Analizy ciąg dalszy
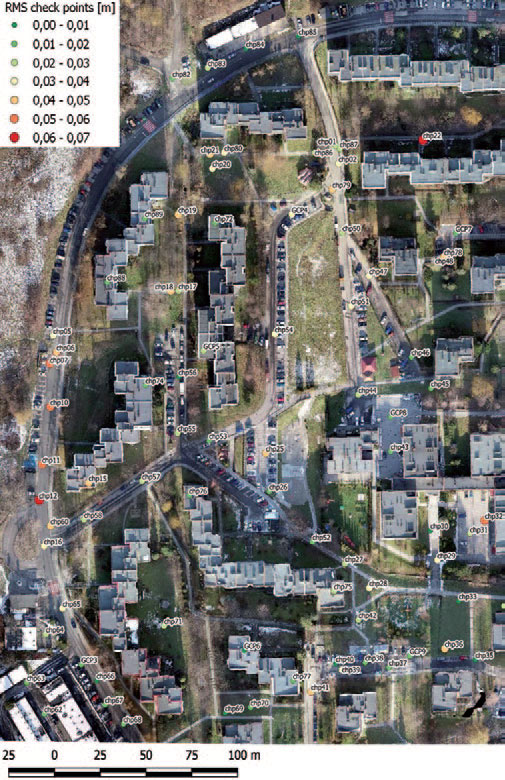
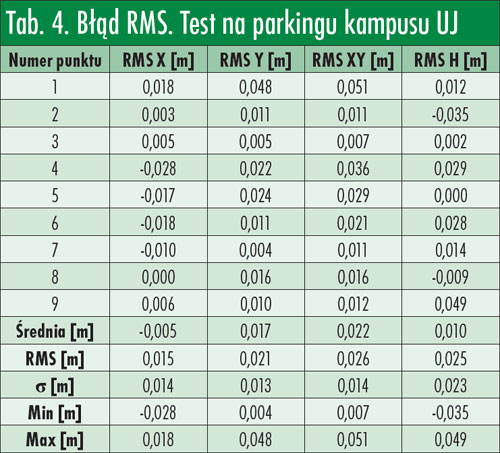
W poprzedniej analizie zarówno fotopunkty, jak i punkty kontrolne obarczone były błędem pomiaru GNSS RTK, który wynosił 8 mm + 1 ppm. Był on zdecydowanie większy niż błąd pomiaru tachimetrem, aby więc go zredukować, punkty pomierzono metodą klasyczną. Nalot przeprowadzono na terenie kampusu Uniwersytetu Jagiellońskiego w Krakowie. Dla lepszego porównania wyników obu analiz zachowano parametry poprzedniego nalotu: 70 m AGL, prędkość 5 m/s, pokrycie podłużne i poprzeczne 70%. Tym razem w terenie pomierzono 10 punktów w miejscach, w których zlokalizowane były studzienki kanalizacyjne. Bazując na wynikach poprzedniej analizy, blok wyrównano z wykorzystaniem 1 fotopunktu, a dokładności sprawdzono na 9 punktach kontrolnych. Błędy na punktach kontrolnych przedstawia tabela 4, natomiast ich rozkład widoczny jest na rysunku 5.
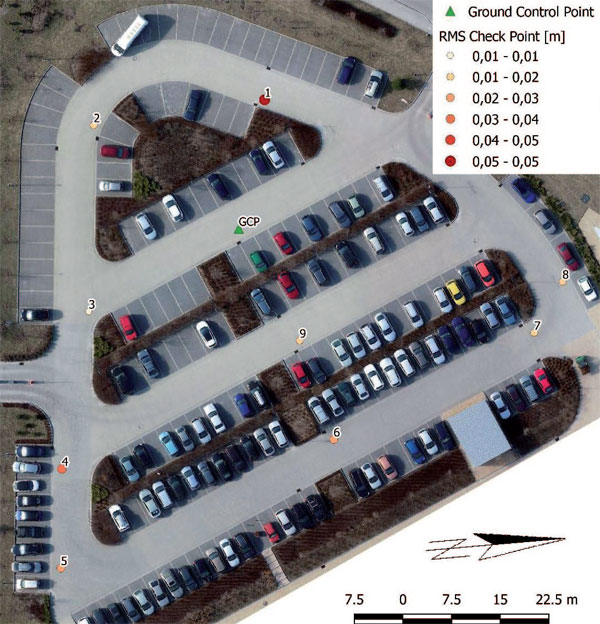
Rys. 5. Rozkład punktów kontrolnych i ich RMS oraz fotopunkt. Test na kampusie UJ
Pomiar tachimetrem zwiększył dokładność XY o jeden centymetr. Jeżeli obszar ma powierzchnię kilku hektarów, a wysokie budynki i drzewa nie ograniczają wizury, pomiar klasyczny na jednym stanowisku trwa niewiele dużej od pomiaru odbiornikiem GNSS. Warto zwrócić uwagę, że w przypadku obu analiz błędy maksymalne przy zastosowaniu jednego fotopunktu nie przekroczyły wartości narzuconej przez rozporządzenie w sprawie standardów pomiarów geodezyjnych dla szczegółów terenowych I grupy.
Dron do licznych zastosowań
Mamy nadzieję, że udało się nam opisać zalety bezzałogowego statku powietrznego z systemem RTK. Przed zakupem należy sobie odpowiedzieć na pytanie, ile faktycznie mamy lub planujemy zleceń, w których wykorzystamy opisaną wyżej technologię. Jeżeli będzie to niewielkich rozmiarów ortofotomozaika lub pojedynczy model 3D wykonane raz w roku, a posiadamy precyzyjny odbiornik GNSS, należy się poważnie zastanowić, czy taka inwestycja się nam „zwróci”. Natomiast jeśli działamy lub zamierzamy działać prężnie w branży UAV, a przy okazji chcemy oszczędzić czas na pomiar terenowy i wskazywanie punktów, to odpowiedź wydaje się oczywista.
Prawidłowe rozmieszczenie fotopunktów i punktów kontrolnych to najważniejszy czynnik stworzenia dokładnej ortofotomapy, natomiast ich pomiar i wskazanie to jeden z najdłuższych, a na pewno najżmudniejszy etap opracowywania danych. Warto wspomnieć, że nawet sam proces przetwarzania trwa krócej w przypadku zdjęć z dokładną geolokalizacją. Algorytm w oprogramowaniu fotogrametrycznym szuka miejsca wykonania zdjęcia w sferze o promieniu zaledwie kilku centymetrów, a nie 10 m (dokładność pokładowych GPS).
Z przeprowadzonych doświadczeń jednoznacznie wynika, że moduł RTK zamontowany na pokładzie BSP pozwala kilkakrotnie skrócić czas opracowania. Dzięki temu możemy opracować większy obszar w krótszym czasie i uzyskać lepsze dokładności.
Bezzałogowy statek powietrzny wyposażony w system RTK z pewnością przyda się przy pomiarach objętości mas ziemnych, hałd usypisk, zwałowisk lub piargów, przy których z punktu widzenia matematycznego nie jest potrzebna wysokość bezwzględna. Model jest przesunięty wówczas o stały wektor, lecz wewnętrznie jest zgodny do kilku centymetrów. DJI Phantom 4 RTK znajdzie również zastosowanie w przypadku terenów, gdzie stabilizacja i pomiar fotopunktów mogą być utrudnione, np. w lasach lub obszarach podmokłych.
Naszym zdaniem powszechne zastosowanie fotogrametrii niskiego pułapu w typowych pracach geodezyjnych to kwestia czasu. Od nas samych zależy, jak szybko będziemy gotowi i konkurencyjni na galopującym rynku geodezyjnym.
Maciej Wywiał
Artykuł został przygotowany przez firmę NaviGate Sp. z o.o. (autoryzowanego dystrybutora DJI Enterprise) i ośrodek szkoleniowy UAVO.
Kontakt z działem dronów (bezzałogowe statki powietrzne, sensory i kamery do BSP, oprogramowanie fotogrametryczne): telefon: 12 200 22 28 w. 105 lub 106, e-mail: drony@navigate.pl, www.navigate.pl
Artykuł opublikowano w bezpłatnym niezbędniku sprzętowym DRONY DLA GEODETY 2019 – pobierz w formie interaktywnego flipbooka lub pliku PDF
| 












 nadchodzące wydarzenia
nadchodzące wydarzenia
 zobacz pozostałe
zobacz pozostałe


