|
Mobilnie znaczy kilka razy szybciej
Z roku na rok rośnie znaczenie mobilnego skanowania 3D. Skanery ręczne zastępują urządzenia stacjonarne, szczególnie gdy wymagany jest szybki i całościowy pomiar, nawet w trudno dostępnych miejscach. Dlatego warto przyjrzeć się najnowszym rozwiązaniom firmy GeoSLAM oferowanym w Polsce przez TPI.
Początki firmy GeoSLAM sięgają 2012 r., kiedy to została założona przez CSIRO (australijską jednostkę naukową, twórców m.in. standardu wi-fi) oraz 3D Laser Mapping (czołowe brytyjskie przedsiębiorstwo zajmujące się technologią LiDAR). Rok później światło dzienne ujrzał pierwszy produkt GeoSLAM – ręczny skaner 3D ZEB-1. Zapoczątkował on linię skanerów ZEB, z których korzysta już kilkuset użytkowników na całym świecie.
Od dobrze znanych urządzeń stacjonarnych różnią się one przede wszystkim sposobem pomiaru. Zamiast wykonywania osobnych skanów na kolejnych stanowiskach i łączenia ich w jedną całość pomiar odbywa się w sposób ciągły. Użytkownik trzyma głowicę skanującą w dłoni i chodzi po lub wokół skanowanego obiektu. Wynikiem jest jedna chmura punktów, która odzwierciedla cały skanowany obszar, oraz trajektoria pokazująca, jak przemieszczał się skaner w trakcie pomiaru

Od lewej: GeoSLAM ZEB-Revo, ZEB-Revo RT i ZEB-Horizon
Jak to działa?
Warto wyjaśnić, jaka technologia napędza te urządzenia. Nie potrzebują one danych z odbiornika GNSS czy znaczników umieszczonych na obiekcie. Proces pomiaru bazuje ma algorytmie SLAM (Simultaneous Localisation And Mapping). Do działania potrzebuje on dwóch typów danych. Pierwszym z nich jest chmura punktów pozyskana z głowicy skanującej. Chmura ta składa się z wielu mniejszych chmur, które dopasowywane są z wykorzystaniem ich geometrii oraz informacji zebranych z jednostek inercyjnych (Inertial Measurement Unit, IMU), które generują ten drugi typ danych. IMU mierzy kąty, o jakie obróciła się głowica skanująca, oraz przyspieszenia, jakim została poddana.
Na podstawie tych danych algorytm SLAM jest w stanie spasować ze sobą pojedyncze chmury, tak aby utworzyły jedną całość. Warunkiem poprawnego działania jest pomiar tworzący zamkniętą pętlę – koniec skanowania musi pokrywać się z jego początkiem. Podczas skanowania np. wnętrza budynku pomiar będzie tym dokładniejszy i bardziej kompletny, im bardziej krętą i przecinającą się trasę pokona użytkownik ze skanerem. W przypadku takich obiektów, jak długie, proste chodniki czy korytarze, należy po prostu przejść w tam i z powrotem. Obecnie dokładności osiągane przez skanery ręczne sięgają kilku centymetrów, jednak technologia skanowania mobilnego rozwija się tak szybko, że zapewne w ciągu paru lat możliwe będzie uzyskiwanie wartości milimetrowych.
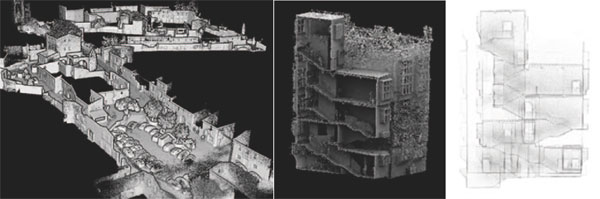
Przykładowe skany budynków
Gdzie tego użyć?
Przede wszystkim w branżach, gdzie wymagany jest szybki pomiar znacznych obszarów wewnątrz budynków lub pod ziemią. Zeskanowanie całej kondygnacji budynku mieszkalnego o dużej liczbie pomieszczeń i łącznej powierzchni 800 m kw. zajmuje około 15 minut, a po 20 kolejnych minutach uzyskujemy już złożoną i dopasowaną chmurę punktów. W przypadku skanera stacjonarnego nie obyłoby się bez kilkunastu stanowisk, które następnie należałoby jeszcze do siebie dopasować i przetworzyć. Tak więc użycie rozwiązania GeoSLAM znacznie skraca czas, jaki trzeba poświęcić na pomiar i opracowanie wyników.
Dostarczane ze skanerem oprogramowanie GeoSLAM Hub pozwala szybko zwektoryzować uzyskane dane w celu utworzenia np. planów pomieszczeń lub przekrojów i wyeksportowania ich jako pliki DWG czy DXF.
Dodatkowo GeoSLAM wraz z firmą Clearedge3D proponują oprogramowanie Verity do kontroli jakości i inspekcji budynków w trakcie budowy. Po wykonaniu skanu możliwe jest porównanie go z modelem CAD/BIM oraz sprawdzenie, czy poszczególne elementy (jak np. belki, słupy) są prawidłowo zamontowane.
Z kolei w górnictwie skaner znajdzie zastosowanie w szybkim pomiarze chodników oraz infrastruktury. W tym przypadku chmura punktów posłuży np. do tworzenia przekrojów poprzecznych, podłużnych, obliczeń pola powierzchni i objętości. W polskich kopalniach sporą popularnością cieszy się łączenie wyników pomiarów ze skanerów stacjonarnych i mobilnych. W miejscach występowania skomplikowanej infrastruktury, na skrzyżowaniach chodników – gdzie potrzebna jest milimetrowa dokładność i bardzo duża gęstość punktów – używana jest technologia stacjonarna. Następnie te precyzyjne chmury punktów łączone są ze sobą za pomocą skanów wykonanych instrumentem GeoSLAM. Skanowanie mobilne wykorzystywane jest także w energetyce – np. do pomiaru hałd w zamkniętych przestrzeniach, gdzie nie jest możliwy nalot dronem.
W tym miejscu warto wspomnieć o współpracy firm GeoSLAM i Bentley Systems, której owocem jest wykorzystanie danych pozyskanych ze skanera – czyli nie tylko chmury punktów, ale też filmu rejestrowanego przez opcjonalną kamerę ZEB-CAM – w zaawansowanym oprogramowaniu do fotogrametrii, czyli Bentley ContextCapture. Dzięki temu można uzyskać jeden spójny wynik w postaci siatki trójkątów (reality mesh), która bardzo dobrze odzwierciedla zarówno geometrię, jak i kolor mierzonego obiektu.
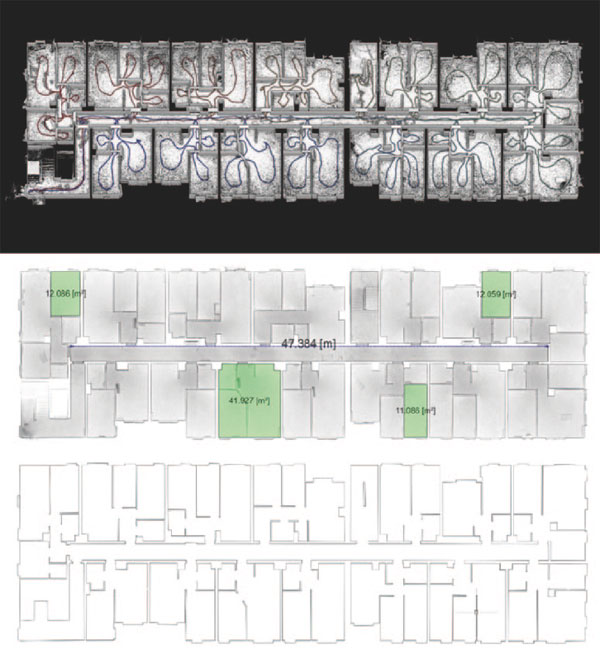
Od góry: skan kondygnacji o łącznej powierzchni ponad 800 m kw. wraz z naniesioną trajektorią, rzut z góry na skan, zwektoryzowany w GeoSLAM Hub rozkład pomieszczeń w formie pliku DWG
Jak to dokładnie wygląda?
Urządzenie do skanowania w ruchu tworzą dwie zasadnicze części: głowica skanująca (która może być trzymana w dłoni, ale też zamontowana na plecaku, tyczce lub pojeździe) oraz tzw. datalogger (czyli bateria, twardy dysk oraz komputer sterujący skanerem).
Obecnie rodzina instrumentów GeoSLAM składa się z trzech produktów. Pierwszy z nich to ZEB-Revo, który służy do pracy w trudnych warunkach (certyfikat IP64). Dane podczas skanowania są zapisywane na datalogerze i następnie po zakończeniu pomiarów kopiowane na pamięć USB i obrabiane w komputerze.
Drugi skaner – ZEB-Revo RT (Real-Time) – pozwala na bieżąco obserwować przebieg pomiaru (chmurę punktów oraz trajektorię) na ekranie smartfona lub tabletu połączonego ze skanerem za pomocą wi-fi. Przy tym rozwiązaniu chmura punktów jest gotowa praktycznie od razu po zakończeniu skanowania. Tym, co łączy te dwa modele, jest głowica skanująca, która ma zasięg do 30 m oraz dokładność lokalną rzędu 2-3 cm.
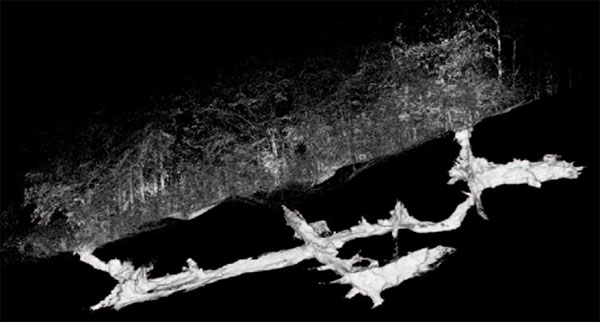
Skan jaskini na Dolnym Śląsku
Trzecim i najnowszym modelem (premiera odbyła się na targach Intergeo 2018) jest ZEB-Horizon z głowicą nowego typu o zwiększonym zasięgu (do 100 metrów) oraz szybkości skanowania (do 300 tys. pkt/s). Instrument ten może być też montowany na platformach UAV.
Równie ważnym elementem całego systemu jest oprogramowanie. Skanery dostarczane są wraz z aplikacją GeoSLAM Hub, które służy do nie tylko do obróbki wyników pomiarów, ale też do łączenia ich ze sobą, kolorowania chmury i eksportowania w takich formatach, jak: LAS, LAZ, E57 lub PLY. Program zawiera też moduł GeoSLAM Draw, który umożliwia georeferencję, tworzenie przekrojów, rzutów, wektoryzację oraz obliczenia pól powierzchni i objętości hałd.
Jednym z przejawów rewolucji informacyjnej jest rozwój technologii skanowania mobilnego. Ma ona wiele zalet, a sama tylko oszczędność czasu pomiaru – względem technologii stacjonarnej – dochodzi do 90%. Inwestowanie w rozwiązania bazujące na algorytmie SLAM wydaje się więc nieuchronne.
Karol Derejczyk
TPI
Artykuł pochodzi z bezpłatnego niezbędnika GEODETY „SKANOWANIE LASEROWE 2018”
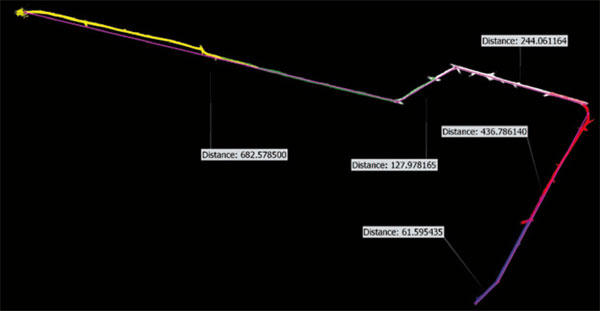
Skan chodnika kopalni o długości 1,6 km złożony z 5 skanów połączonych następnie w jedną całość
| 












 nadchodzące wydarzenia
nadchodzące wydarzenia
 zobacz pozostałe
zobacz pozostałe


