|
Zdzisław Kurczyński
Zasada działania
Ideę skaningu laserowego można sprowadzić do zasady laserowego pomiaru odległości z lecącego samolotu (helikoptera) do punktów powierzchni terenu. Jeżeli gęstość terenowych punktów pomiarowych jest tak duża, że ich średnia odległość wynosi około metra do kilku metrów, to w efekcie uzyskuje się quasi-ciągłą, przestrzenną reprezentację powierzchni terenu.
W praktyce promień dalmierza laserowego, poprzez zwierciadło skanujące lub układ światłowodów "przeczesuje" teren w płaszczyźnie poprzecznej do kierunku lotu. Laser działa impulsowo i z dużą częstotliwością "próbkuje" teren. Energia częściowo odbita od powierzchni terenu jest poprzez układ optyczny skanera odbierana i rejestrowana. Tak jak w tradycyjnym dalmierzu laserowym, na podstawie pomiaru czasu powrotu odbitego sygnału określa się odległość: samolot - punkt terenowy.
Z dalmierzem synchronicznie współpracuje system GPS, który określa pozycję samolotu, z której wysłano impuls, oraz inercjalny system nawigacyjny (INS), który określa aktualne nachylenia kątowe platformy, na której zamontowana jest optyczna głowica skanująca. Integracja danych z tych trzech systemów pomiarowych wskazuje położenie, z którego wykonano pomiar odległości, samą odległość i jej kierunek w przestrzeni. Pozwala to określić współrzędne punktu terenowego X, Y, Z, w który w danym momencie był wycelowany laser.
Zasada działania lotniczego skanera laserowego
Nietrudno dostrzec, że lotniczy skaner laserowy działa jak szybki tachimetr elektroniczny, dlatego też system ten nazywany jest również "Lotniczą Total Station".
Z opisanej zasady działania łatwo zauważyć podobieństwo skanera laserowego do radaru, istotna różnica sprowadza się do tego, że radar działa w zakresie mikrofalowym, a skaner w zakresie optycznym. Z tych powodów skaner laserowy często określa się mianem radaru laserowego, lub LIDAR-u (ang.: LIght Detection and Ranging), tj. systemu, na który składa się laser (emiter świata spójnego) i odbiornik światła odbitego. Pozwala to określić odległość do obiektu.
Ze skanerem laserowym może współpracować kamera wideo skierowana pionowo w dół. Kamera ta rejestruje na taśmie pas terenu szerszy od zasięgu lasera. Oprócz kamery rejestrującej nadirowo, można zainstalować drugą kamerę, skierowaną pod kątem 45° do przodu i dającą perspektywiczny wgląd w obrazowany teren. Obrazy wideo na etapie obróbki danych są przydatne do interpretacji pokrycia terenu i filtrowania danych pomiarowych. Mogą stanowić również tani, samodzielny produkt w budowanym systemie GIS.
Z przedstawionego działania systemu skaningu laserowego wynika, że w wyniku pomiaru otrzymuje się gęstą sieć punktów o współrzędnych X, Y, Z w układzie współrzędnych WGS-84 lub przeliczonych na inny układ, reprezentujących terenowe punkty, od których odbił się promień lasera. Opisany proces jest prawie całkowicie zautomatyzowany. Zwykle nie jest to jednak produkt końcowy. Jeżeli produktem finalnym jest model wysokościowy terenu - Numeryczny Model Terenu (NMT), odniesiony do powierzchni gruntu, to wszystkie odbicia od obiektów nieleżących na powierzchni gruntu (jak budynki, drzewa, samochody, kable linii przesyłowej czy nawet ptaki) muszą być usunięte. Ten proces "czyszczenia" danych pomiarowych realizowany jest po misji (tryb off-line) i wymaga specjalistycznego oprogramowania i dość znacznych mocy obliczeniowych. Obróbka danych pomiarowych prowadzona jest interaktywnie i może być zautomatyzowana tylko do pewnego stopnia. Większość systemów konstruowanych jest z przeznaczeniem ich instalacji na pokładzie samolotu, część jednak projektowanych jest z myślą o instalacji na pokładzie helikoptera, lub podwieszeniu pod helikopterem.
Impuls laserowy może doznać więcej niż jednego odbicia. Jeżeli impuls trafi na obszar zadrzewiony, to pierwsze częściowe odbicie nastąpi od korony drzewa, reszta energii przejdzie przez koronę drzewa i odbije się od powierzchni gruntu (rysunek). Między tymi skrajnymi odbiciami mogą mieć miejsce odbicia pośrednie. Systemy laserowe rejestrują tylko pierwsze, tylko ostatnie, lub oba odbicia (tzw. echa). Są systemy rejestrujące odbicia pośrednie - obecnie do 5 odbić. Ma to kapitalne znaczenie dla stosowania systemu. Na podstawie zarejestrowanych wielokrotnych odbić można określić wysokość drzew, a nawet numeryczny model wysokości pokrywy lasu względem powierzchni terenu (tzw. znormalizowany NMT), czy np. zwis kabli energetycznych. Dla impulsów, które trafią na powierzchnię gruntu czy dach budynku nastąpi tylko jedno odbicie (pierwsze echo jest równe ostatniemu).
Obiekty naziemne w różnym stopniu odbijają padającą energię. Najmniejsze odbicie w zakresie bliskiej podczerwieni następuje od powierzchni wody, zaś największe dla lodu i śniegu (50-80%); dla roślinności wynosi ono 30-50%; dla piasku 10-20%. Nowsze systemy mogą rejestrować intensywność sygnału powrotnego. Może to dać podstawę do różnicowania typów powierzchni, a nawet automatycznego rozpoznawania obiektu.
Tabela przedstawia typowe parametry komercyjnych systemów skanerowych.
|
Parametr
|
Typowe wartości
|
|
długość fali lasera
|
1,064 µm
|
|
częstotliwość generowania impulsu
|
5-33 kHz (max 100 kHz)
|
|
długość impulsu
|
10 ns
|
|
rozbieżność wiązki impulsu
|
0,25-2 mrd
|
|
częstotliwość skanowania
|
25-40 Hz
|
|
wysokość lotu
|
Helikopter: 200-300 m,
samolot: 500-1000 m, (maks. 6000 m)
|
|
kąt skanowania (całkowity)
|
20°-40° (maksymalnie 75°)
|
|
szerokość obrazowanego pasa
|
0,35-0,7 wysokości lotu
|
|
odległość punktów laserowych
|
0,5-2 m
|
|
częstotliwość rejestracji GPS
|
1-2 Hz
|
|
częstotliwość rejestracji INS
|
50 Hz (maksymalnie 200 Hz)
|
|
dokładność wysokości punktów laserowych
|
0,15-0,20 m
|
Produkty skaningu laserowego
Produktem skaningu laserowego jest olbrzymi zbiór punktów w przestrzennym układzie współrzędnych (tzw. chmura punktów). Punkty te są punktami laserowymi i stanowią punkty odbicia od powierzchni terenu oraz obiektów "wystających" ponad tę powierzchnię, jak budynki, drzewa, przewody linii energetycznych itp. (rysunek). Punkty te są więc quasi-ciągłą reprezentacją Numerycznego Modelu Pokrycia Terenu - NMP (ang.: Digital Surface Model - DSM). Model ten stanowi produkt przydatny dla wielu zastosowań, np. dla budowy przestrzennego modelu miasta (model miasta 3-D), telekomunikacji, planowania przestrzennego, tworzenia wirtualnych krajobrazów, symulacji lotów nad terenem itp.
Najczęstszym jednak zastosowaniem skaningu laserowego jest budowa Numerycznego Modelu Rzeźby Terenu - NMT (ang.: Digital Terrain Model - DTM, lub Digital Elevation Model - DEM), tj. reprezentacji fizycznej powierzchni terenu z jej morfologicznymi formami. W takim przypadku odbicia od obiektów "wystających" ponad powierzchnię terenu muszą być usunięte. Dzieje się to na etapie opracowania w procesie edycji danych. Edycja ta dotyczy w pierwszym rzędzie obszarów zurbanizowanych i zalesionych, gdzie usunięciu podlega znaczna część punktów.
Wielokrotne odbicia impulsu laserowego od drzewa oraz profil
danych skanerowych przez obszar zalesiony
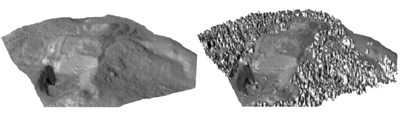
Numeryczny Model Terenu (dane laserowe po filtracji)
i Numeryczny Model Pokrycia (dane laserowe przed filtracją)
W obszarach zalesionych znaczna część impulsów odbija się od koron drzew i te - jako niereprezentujące powierzchni terenu - podlegają usunięciu na etapie edycji danych. Jednak znaczna część impulsów dociera do powierzchni terenu (rysunek). Ocenia się, że w porze zimowej poprzez korony drzew dociera do powierzchni gruntu około 35% impulsów laserowych w lesie szpilkowym i ponad 60% w lesie liściastym. W porze letniej penetracja ta wynosi odpowiednio 25%-40% dla lasu szpilkowego i 20-25% dla lasy liściastego. Stanowią one wystarczającą reprezentację powierzchni terenu dla wygenerowania prawidłowego NMT na obszarach leśnych. Jest to unikalna cecha skaningu laserowego i stanowi o jej przewadze nad tradycyjnymi zdjęciami lotniczymi.
Dokładność
Przy ocenie dokładności produktu końcowego, którym jest NMT, należy uwzględnić dodatkowo rozkład (gęstość) punktów laserowych oraz skuteczność "czyszczenia" danych z punktów odstających od powierzchni terenu. Uwzględniając te elementy, można w uproszczeniu przyjąć, że dokładność wysokościowa NMT wygenerowanego techniką skaningu laserowego wynosi (błąd średni):
mZ NMT = 0,15-0,25 m
Jest to bardzo wysoka dokładność możliwa do osiągnięcia z bezpośrednich pomiarów terenowych lub opracowania zdjęć lotniczych w dużej skali.
Zalety i ograniczenia
Technika skaningu laserowego ma wiele istotnych zalet, wyróżniających ją spośród innych technik pomiarowych:
- Skaner laserowy jest systemem aktywnym (ma własne źródło "oświetlenia"), co czyni go całkowicie niezależnym od warunków oświetleniowych.
- Obrazowanie tą techniką jest możliwe nawet przy pełnym zachmurzeniu, o ile podstawa chmur jest wyższa od wysokości lotu. Tylko silny deszcz i mgła, tj. warunki ograniczające penetrację promienia laserowego, stanowią przeszkodę. Oznacza to, że w naszych warunkach klimatycznych prawie połowa dni w roku to dni "lotne". Stanowi to bardzo istotną przewagę nad zdjęciami lotniczymi.
- Unikalną cechą lotniczego skanera laserowego jest możliwość przenikania przez warstwę roślinności. Przy dużej gęstości próbkowania jest stosunkowo łatwo - na etapie obróbki danych - odróżnić i wyeliminować odbicia od koron drzew od odbić od gruntu. Właściwość ta czyni technologię skaningu laserowego przydatną na obszarach zalesionych, gdzie tradycyjne zdjęcia nie sprawdzają się.
- Bardzo wysoka dokładność wysokościowa danych pomiarowych.
Wśród ograniczeń skaningu laserowego można wymienić:
- Brak odbić od powierzchni wody, co utrudnia lokalizację linii brzegowej.
- Trudności określenia linii szkieletowych i linii nieciągłości terenu.
- Stosunkowo wysoki koszt samej aparatury i usługi.
Wydajność i koszty Technika skaningu laserowego jest produkcyjnie stosowana od połowy lat 90., w ostatnich kilku latach nastąpił dość gwałtowny wzrost liczby zainstalowanych systemów.
Technika jest wydajna, ale wiąże się ze znacznymi kosztami. Cena samego sprzętu to kwota rzędu 0,8-2 mln USD. Stałe koszty operacyjne powodują, że jest opłacalna na dużych obszarach, tj. obszarach powierzchniowych większych od 5 km2, lub obiektach "korytarzowych" dłuższych od 15 km.
Istnieje i jest rozwijany rynek producentów skanerów. Skaning laserowy wchodzi do zakresu usług firm fotolotniczych. Ukształtował się rynek usług w tym zakresie. Koszt gotowego produktu zależy od kilku czynników: wielkości obszaru, gęstości punktów pomiarowych, charakteru terenu i koniecznej filtracji danych. Ocenia się, że dla dużych projektów koszt wygenerowania NMT kształtuje się na poziomie 150-300 USD/km2.
Przy porównaniu techniki skaningu laserowego z fotogrametrią bazującą na tradycyjnych zdjęciach lotniczych należy mieć na uwadze, że porównywalne - pod względem dokładności - wyniki mogą być osiągnięte z opracowania zdjęć wielkoskalowych, w skali około 1:8000. Analiza kosztów wykazuje, że jeżeli produktem końcowym ma być wygenerowanie precyzyjnego NMT, to skaning laserowy pod względem kosztów i wydajności ma przewagę nad tradycyjnym opracowaniem fotogrametrycznym. Należy oczekiwać, że w tym zakresie wyprze zdjęcia lotnicze. Przewaga nad zdjęciami jest wyraźnie widoczna, jeśli produktem końcowym ma być tylko NMT. Jeżeli oprócz NMT przewiduje się również inne produkty pochodne zdjęciom, takie jak ortofotomapa, to przewaga ta nie jest już tak oczywista i wymaga bardziej szczegółowej analizy konkretnej sytuacji.
Przykłady zastosowań
Lotniczy skaning laserowy znajduje zastosowanie wszędzie tam, gdzie potrzebna jest precyzyjna i szybko dostępna informacja o ukształtowaniu terenu. Jako przykłady można tu wskazać zastosowania:
- budowa precyzyjnego NMT dla różnorakich potrzeb,
- pomiar wysokości szaty roślinnej,
- opracowanie wysokościowe morskiej strefy brzegowej,
- opracowanie wysokościowe obszarów zagrożonych powodzią,
- inwentaryzacja obszarów zagrożonych erozją i lawinami,
- kartowanie lodowców,
- obrazowanie obszarów kopalń odkrywkowych dla oceny wielkości urobku, kontroli zwałowisk, rekultywacji itp.
- budowa przestrzennego modelu aglomeracji miejskich (tzw. model miasta 3-D) dla potrzeb telekomunikacji (badanie propagacji fal dla optymalizacji rozmieszczenia przekaźników), urbanistów, planistów itp.
- inwentaryzacja i konserwacja linii energetycznych, dróg, rurociągów, wałów przeciwpowodziowych i innych wydłużonych obiektów infrastruktury (tzw. opracowania korytarzowe).
Perspektywicznym (i już stosowanym) rozwiązaniem jest połączenie lotniczego skanera laserowego z pomiarową kamerą cyfrową (odwołanie). Pozwala to jednocześnie pozyskiwać, a później opracowywać, dane z obu systemów i tworzyć praktycznie wszystkie podstawowe produkty fotogrametryczne, zaspokajające potrzeby zastosowań pomiarowych i interpretacyjnych.
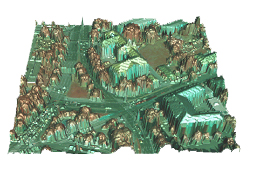
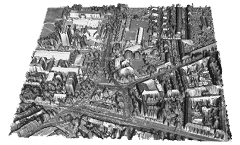
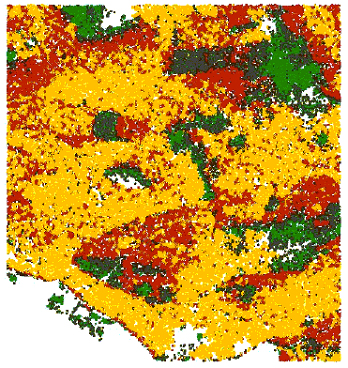
Modele przestrzenne miast (3D)
(wysokości kodowane tonami szarościlub paletą barw z cieniowaniem)
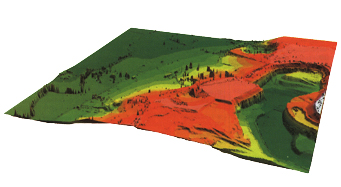
Inwentaryzacja kamieniołomu (wysokości kodowane paletą barw z cieniowaniem)
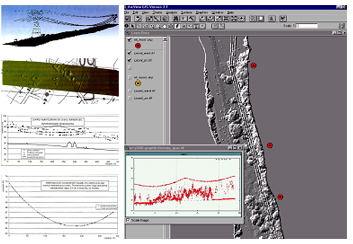
Inwentaryzacja linii energetycznych
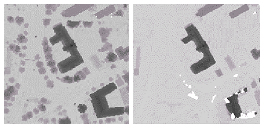
Inwentaryzacja zieleni: u góry rejestracja pierwszego (z lewej) i ostatniego "echa"
(wysokości kodowane tonami szarości; u dołu znormalizowany NMP szaty roślinnej
- wysokości kodowane paletą barw)
Dr hab. Zdzisław Kurczyński jest pracownikiem dydaktycznym Instytutu Fotogrametrii i Kartografii Politechniki Warszawskiej
|